
开源仓库与资源边界
项目开源仓库:https://github.com/Bill-xing/HMI
代码已开源;数据集、模型权重和 LeArm STL 结构资源按照 README 与技术文档中的边界单独说明。本文保留工程实现、算法训练、Qt/OpenGL 集成和数字孪生细节,并把原始技术文档中的关键图片转存到网站静态目录,避免本地导出路径导致坏链。
项目概览
HMI 是面向幻尔科技 Hiwonder LeArm 机械臂平台的非官方二次开发上位机,主要用于焊缝识别、UNet 图像分割推理和机械臂数字孪生滑块控制演示。Qt/OpenGL 机械臂三维显示参考 eagleqq/Robot3D,UNet 训练、推理与 mIoU 评估流程参考 bubbliiiing/unet-pytorch。本项目在此基础上完成 LeArm 模型适配、Qt 上位机界面整合、焊缝识别推理调用、滑块式关节仿真控制和桌面应用打包验证。
| 模块 | 关键内容 |
|---|---|
| Qt/C++ 上位机 | logon、secinterface、mainwindow、seamtest 界面与业务逻辑 |
| 识别推理 | predict.py 通过 QProcess 调用,默认使用 model_data/seam_unet.pth |
| 数据与训练 | 自采焊缝数据集,json_to_dataset.py 将 LabelMe JSON 转 VOC mask |
| 数字孪生 | DDR6RobotWidget 加载 base_link.STL 到 link_5.STL 并按 DH 参数渲染 |
| 路径管理 | runtime_paths.cpp 统一处理工程根目录、Python 环境和输出路径 |
| 本地配置 | scripts/hmi_local_env.example.sh 仅作为本机路径配置样例,真实配置不提交 |
资源边界
| 内容 | 状态 |
|---|---|
| 仓库代码 | 已开源,仓库地址为 Bill-xing/HMI |
| 焊缝分割数据集 | 作者自采,不直接提交到 Git,说明采用 CC BY 4.0 |
| 自训练 UNet 权重 | 默认文件名 seam_unet.pth,不写入 Git 历史,说明采用 Apache License 2.0 |
| LeArm STL/结构模型 | 仓库不提供,不授权二次分发;本地演示需自行准备有权使用的 STL |
| 默认登录 | 演示账号为 username: admin、password: admin,只用于界面流程演示 |
演示效果
| 机械臂识别到焊缝 | 滑块控制独立关节 |
|---|---|
 |
 |
原视频链接:
参考项目与授权边界
第三方来源与许可证说明见 THIRD_PARTY_NOTICES.zh-CN.md。
- bubbliiiing/unet-pytorch:UNet 训练、推理和 mIoU 评估流程的主要参考项目,原项目采用 MIT License。
- eagleqq/Robot3D:Qt/OpenGL 机械臂三维显示、STL 加载和关节控制部分的主要参考项目。
- LeArm 机械臂 STL/结构模型:本仓库只说明适配方式和期望文件名,不提供 STL 文件。
- 模型权重:
model_data/seam_unet.pth为本项目任务场景下训练得到的权重文件,默认不提交到 Git 仓库。
本仓库当前不声明一个覆盖全部内容的统一开源许可证。公开发布前仍应确认代码、STL 资源和第三方依赖的许可条件;数据集与权重的许可证以上述说明为准。
详细技术文档
面向焊缝识别的机器人孪生上位机技术文档
1. 文档说明
本文档依据以下材料整理:
- 毕业论文:
要交给老师的电子版文件/02_邢鉴明_2021212307_ZX_LW.pdf - 源码工程:
HMI - 补充参考:
要交给老师的电子版文件/02_邢鉴明_2021212307_ZX_LW.docx
文档重点说明系统的工程实现,而不是简单复述论文。内容覆盖焊缝语义分割、Qt/C++ 上位机、串口控制、OpenGL 数字孪生、模块联动、复现部署和验证方法。论文中的关键图片已经转存为网站静态资源,并在对应技术章节中引用。
3. 总体架构
3.1 架构分层
系统由四个主要层次组成:
flowchart TB
User[操作人员] --> GUI[Qt/C++ 上位机界面]
GUI --> Login[登录与二级功能选择]
GUI --> SeamUI[焊缝识别界面 seamtest]
GUI --> ControlUI[机械臂控制界面 MainWindow]
ControlUI --> Serial[QSerialPort 串口通信]
ControlUI --> Twin[DDR6RobotWidget 数字孪生视图]
SeamUI --> QProc[QProcess 启动 Python 推理]
QProc --> PyPredict[predict.py]
PyPredict --> Model[UNet/VGG16 权重 seam_unet.pth]
PyPredict --> Result[segmented_image.png]
SeamUI --> EventBus[globaleventbus 单例事件总线]
EventBus --> ControlUI
Twin --> STL[res/binary/*.STL]
各层职责如下:
| 层级 | 主要组件 | 职责 |
|---|---|---|
| 界面层 | logon.ui、secinterface.ui、mainwindow.ui、seamtest.ui |
登录、功能入口、图像显示、串口参数配置、滑块控制 |
| 业务层 | logon.cpp、secinterface.cpp、mainwindow.cpp、seamtest.cpp |
流程调度、信号槽连接、串口指令组包、图像处理进程管理 |
| 算法层 | predict.py、unet.py、nets/、utils/、train.py |
模型训练、推理、mIoU 评估、数据增强 |
| 渲染层 | rrglwidget.cpp、ddr6robotwidget.cpp、stlfileloader.cpp |
OpenGL 初始化、STL 二进制解析、机械臂关节变换和交互渲染 |
| 运行时支撑 | runtime_paths.cpp、scripts/、docs/reproduction/ |
项目根目录发现、Python 环境定位、输出目录管理、打包复现 |
3.2 工程目录
HMI 的关键目录和文件如下:
HMI/
├── HMI.pro # Qt qmake 工程文件
├── main.cpp # 应用入口与 --self-test 自测入口
├── logon.* # 登录窗口
├── secinterface.* # 二级功能选择窗口
├── mainwindow.* # 机械臂控制与串口通信窗口
├── seamtest.* # 焊缝识别窗口
├── globaleventbus.* # 识别成功事件总线
├── runtime_paths.* # 运行路径、Python 环境、输出路径定位
├── rrglwidget.* # OpenGL 基础渲染窗口
├── ddr6robotwidget.* # LeArm 机械臂数字孪生渲染
├── stlfileloader.* # STL 文件解析与绘制
├── predict.py # 单张图片推理入口
├── unet.py # 推理封装类
├── train.py # 训练脚本
├── get_miou.py # mIoU 评估入口
├── json_to_dataset.py # LabelMe JSON 到分割数据集转换
├── nets/ # UNet/VGG16 网络结构
├── utils/ # 数据加载、损失、训练、指标工具
├── model_data/ # 模型权重目录,默认使用 seam_unet.pth
├── res/binary/ # LeArm STL 文件目录,本仓库不公开分发 STL
├── docs/ # 数据集、权重、复现、打包说明
└── scripts/ # 本地环境与打包脚本
3.3 构建与依赖
Qt 工程使用 HMI.pro 管理,关键配置如下:
| 配置项 | 内容 |
|---|---|
| Qt 模块 | core、gui、widgets、serialport、opengl |
| C++ 标准 | C++17 |
| Python 集成 | 通过 PYTHON_HOME、PYTHON_VERSION 设置 Python 头文件与动态库路径 |
| macOS rpath | 指向 PYTHON_HOME/lib 和应用包内 Resources/python/lib |
| 资源 | res.qrc,包含界面图片资源 |
| 源文件 | 控制、识别、事件总线、运行路径、OpenGL、STL 加载等 C++ 文件 |
Python 依赖记录在 requirements.txt 中,主要包括:
| 依赖 | 版本 | 用途 |
|---|---|---|
torch |
1.10.2 | 模型训练与推理 |
torchvision |
0.11.3 | 视觉模型和预处理生态 |
opencv-python |
4.1.2.30 | 图像 resize、颜色空间转换、后处理 |
Pillow |
8.3.1 | 图像读写与融合 |
numpy |
1.19.2 | 数组计算 |
labelme |
3.16.7 | 标注数据处理 |
matplotlib |
3.3.4 | 训练曲线与评估可视化 |
tqdm |
4.60.0 | 训练进度条 |
4. 焊缝语义分割模块
4.1 技术流程
焊缝识别模块使用 U-Net 系列语义分割网络。完整流程为:采集多角度、多光照焊缝图像,使用 LabelMe 标注焊缝区域,将 JSON 标注转换为 VOC 风格数据集,训练 VGG-UNet 模型,评估 mIoU,最后通过 predict.py 在上位机中执行单张图片推理。
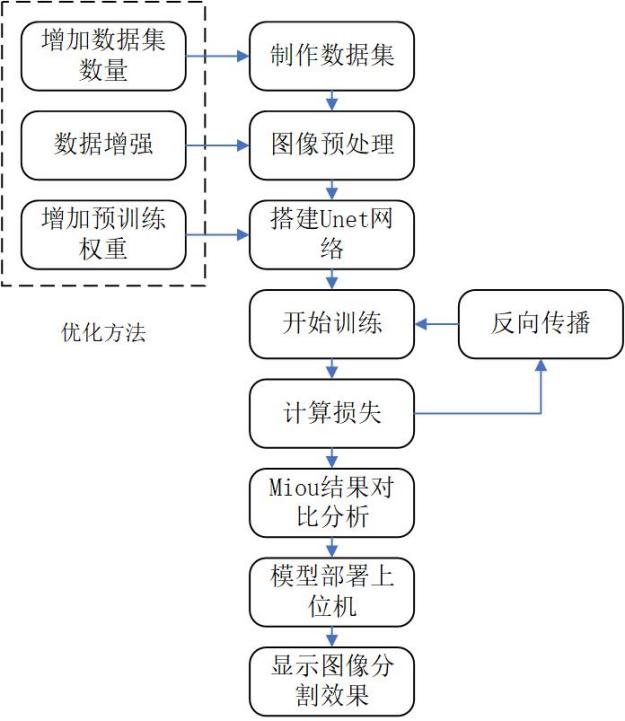
图 2-1 U-Net 语义分割流程
4.2 数据采集与标注
焊缝分割任务采用像素级标注。与目标检测只标注矩形框不同,语义分割需要为每个像素分配类别,因此必须生成与原始图像同尺寸的 mask。论文中使用 LabelMe 对焊缝边缘进行多边形勾画。
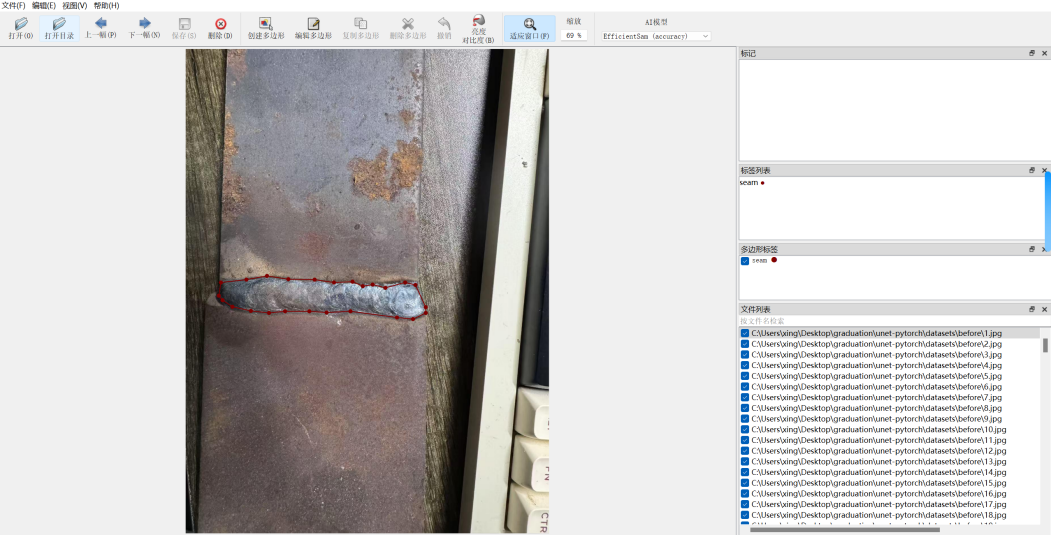
图 2-2 LabelMe 语义分割标签数据集制作示例
数据集类别定义为二分类:
| 类别索引 | 类别名 | 含义 |
|---|---|---|
| 0 | _background_ |
背景 |
| 1 | seam |
焊缝 |
公开数据集说明中记录的划分为:
| 划分 | 数量 |
|---|---|
| train | 845 |
| val | 94 |
| trainval | 939 |
| test | 0 |
VOC 风格目录结构如下:
VOC2007/
├── JPEGImages/ # 原始图像
├── SegmentationClass/ # 分割标签 mask
└── ImageSets/
└── Segmentation/
├── train.txt
├── val.txt
└── trainval.txt
4.3 LabelMe JSON 到 VOC mask 的转换
转换脚本为 json_to_dataset.py。核心逻辑如下:
- 扫描
datasets/before/下的 LabelMe JSON 文件。 - 从 JSON 的
imageData字段或imagePath字段读取原图。 - 使用
labelme.utils.shapes_to_label将多边形标注转为像素标签矩阵。 - 构造类别映射:
_background_ -> 0,seam -> 1。 - 原图保存到
datasets/JPEGImages,mask 保存到datasets/SegmentationClass。
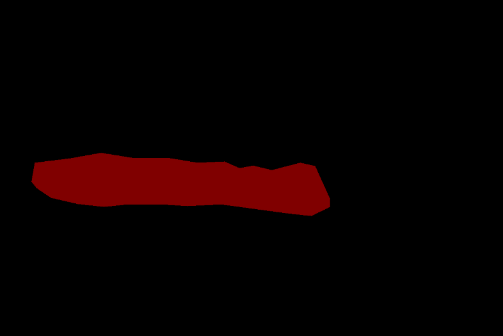
图 2-3 蒙版图像
工程实现中需要注意两个约束:
- mask 必须使用类别索引,而不是 RGB 彩色值。训练时
utils/dataloader.py会将 mask 转为 one-hot 标签。 - 标签图 resize 必须使用最近邻方式,避免连续插值破坏类别索引。
4.4 网络结构
4.4.1 U-Net 基础结构
U-Net 由编码器、解码器和跳跃连接组成。编码器逐级下采样提取局部到全局特征,解码器逐级上采样恢复空间分辨率,跳跃连接将编码阶段的细节特征与解码阶段的语义特征拼接,提升边缘恢复能力。
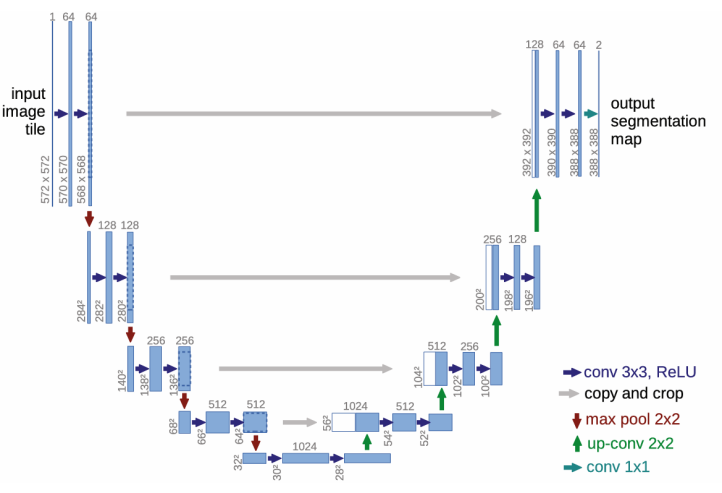
图 2-8 U-Net 网络结构
4.4.2 VGG-UNet 优化结构
项目最终采用 backbone = "vgg" 的 VGG-UNet。其编码器使用 VGG16 提取多尺度特征,解码阶段通过 unetUp 模块逐级恢复空间分辨率,并与编码阶段的同尺度特征进行拼接。该结构比最初的 U-Net 方案更适合本项目的小样本焊缝分割场景。
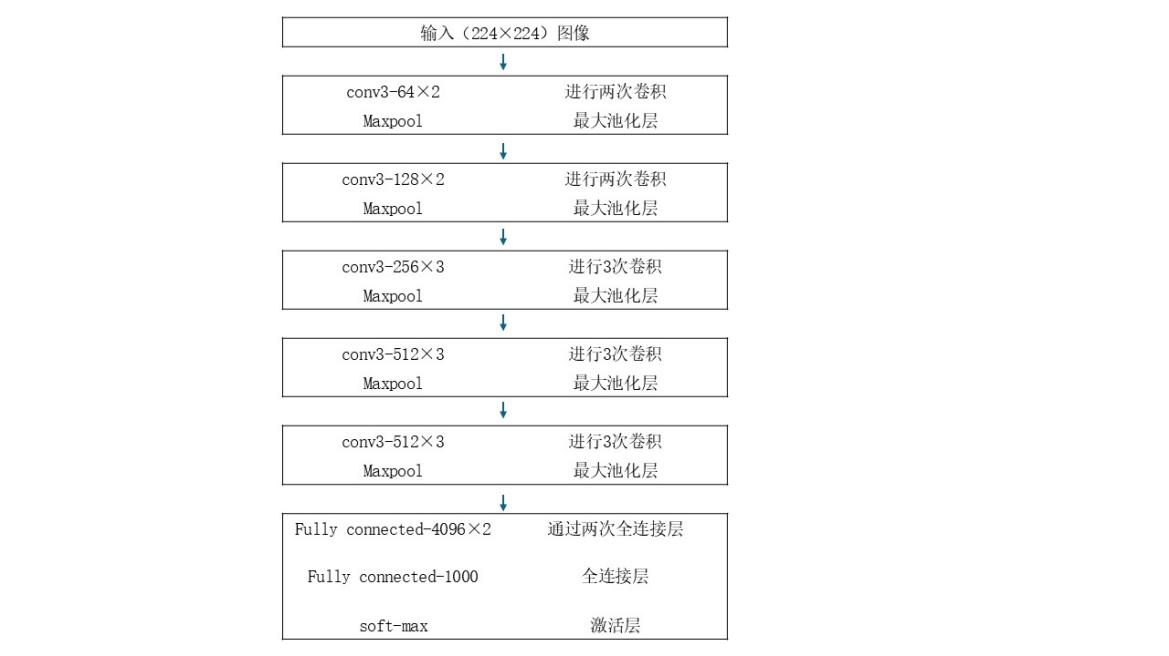
图 2-10 VGG16 网络结构
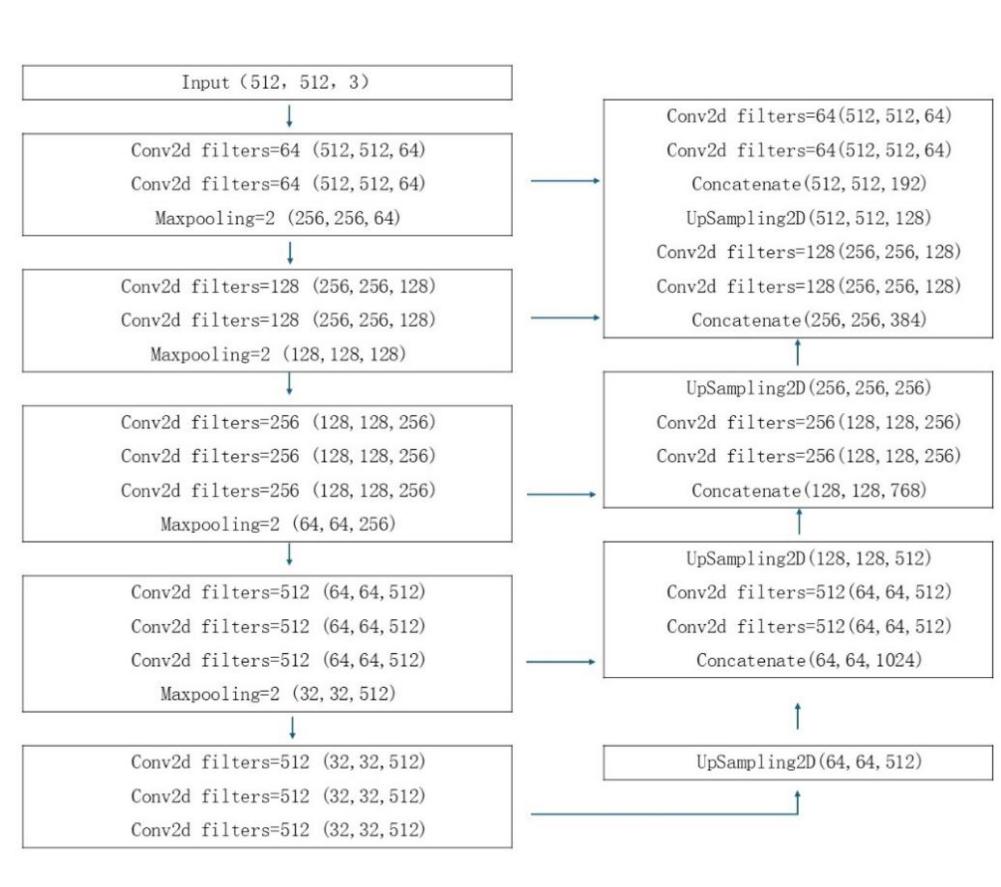
图 2-11 VGG-UNet 网络示意图
nets/unet.py 中的实现要点如下:
Unet类通过backbone参数在 VGG16 编码器和原始 U-Net 编码器之间切换。- VGG 模式下,编码器输出五级特征
feat1到feat5。 - 解码阶段依次执行
up_concat4、up_concat3、up_concat2、up_concat1。 - 输出层生成 2 类像素 logits,对应背景与焊缝。
执行顺序可概括为:
up4 = up_concat4(feat4, feat5)
up3 = up_concat3(feat3, up4)
up2 = up_concat2(feat2, up3)
up1 = up_concat1(feat1, up2)
final = output_layer(up1)
这种结构适合焊缝边缘分割的原因包括:
- VGG16 预训练特征能够改善小数据集训练时的收敛速度和泛化能力。
- U-Net 跳跃连接保留浅层边缘和纹理信息,有利于恢复细长焊缝边界。
- 二分类输出减少类别竞争,任务目标集中于“焊缝/背景”。
4.5 训练配置
训练入口为 train.py。主要超参数如下:
| 参数 | 当前值 | 说明 |
|---|---|---|
Cuda |
True |
优先使用 GPU |
num_classes |
2 |
背景 + 焊缝 |
backbone |
"vgg" |
使用 VGG16 编码器 |
pretrained |
True |
使用预训练权重初始化 |
model_path |
model_data/seam_unet.pth |
继续加载或微调已有权重 |
input_shape |
[512, 512] |
网络输入尺寸 |
Freeze_Epoch |
50 |
冻结阶段训练到第 50 轮 |
Freeze_batch_size |
2 |
冻结阶段 batch size |
Freeze_lr |
1e-4 |
冻结阶段学习率 |
UnFreeze_Epoch |
100 |
解冻阶段训练到第 100 轮 |
Unfreeze_batch_size |
2 |
解冻阶段 batch size |
Unfreeze_lr |
1e-5 |
解冻阶段学习率 |
dice_loss |
True |
使用 Dice Loss 辅助小目标分割 |
focal_loss |
False |
当前未启用 Focal Loss |
optimizer |
Adam | 自适应优化器 |
lr_scheduler |
StepLR, gamma=0.96 | 每轮衰减学习率 |
num_workers |
4 |
数据加载线程数 |
训练流程为:
flowchart LR
ReadList[读取 train.txt / val.txt] --> Dataset[UnetDataset]
Dataset --> Aug[数据增强与预处理]
Aug --> Loader[DataLoader]
Loader --> Forward[模型前向传播]
Forward --> Loss[CE Loss + Dice Loss]
Loss --> Backward[反向传播]
Backward --> Adam[Adam 更新参数]
Adam --> Save[保存 logs/ep*-loss*.pth]
4.6 数据增强与预处理
utils/dataloader.py 中 get_random_data() 实现训练增强,验证阶段则只执行等比例缩放和居中填充。
训练阶段增强包括:
| 增强方式 | 实现细节 | 目的 |
|---|---|---|
| 随机宽高比扰动 | jitter=.3,随机生成新宽高比 |
提升对不同拍摄角度和焊缝形态的适应能力 |
| 随机缩放 | scale 在 0.25 到 2 之间 |
提升尺度鲁棒性 |
| 水平翻转 | 50% 概率 | 增强方向不变性 |
| 随机位置粘贴 | 将缩放图像粘贴到 512x512 灰色背景 | 模拟目标位置变化 |
| HSV 颜色扰动 | 色调、饱和度、亮度随机变化 | 提升复杂光照下的识别稳定性 |
输入图像预处理流程:
- 使用
cvtColor()确保输入为 RGB。 - 使用
resize_image()等比例缩放到512x512,不足部分填充灰色背景。 - 使用
preprocess_input()做归一化。 - 将维度从
HWC转换为CHW,再增加 batch 维度。
标签处理流程:
- mask 使用最近邻插值缩放,防止类别编号被破坏。
- 将超出类别范围的像素设置为
num_classes。 - 使用
np.eye(num_classes + 1)转为 one-hot 标签,供 Dice/F-score 等计算使用。
4.7 损失函数与评价指标
训练中默认损失为交叉熵损失加 Dice Loss。Dice Loss 对小目标分割更友好,可缓解焊缝区域占图像比例较小导致的类别不平衡。
DiceLoss = 1 - \frac{2|X \cap Y|}{|X| + |Y|}
其中 X 为预测区域,Y 为真实标注区域。
评价指标采用像素级 IoU、PA Recall 和 Precision:
PA\_Recall = \frac{TP}{TP + FN}
Precision = \frac{TP}{TP + FP}
IoU = \frac{TP}{TP + FP + FN}
| 符号 | 含义 |
|---|---|
| TP | 焊缝区域被正确识别的像素数量 |
| FP | 背景区域被误判为焊缝的像素数量 |
| FN | 实际焊缝区域未被识别的像素数量 |
| TN | 背景区域被正确排除的像素数量 |
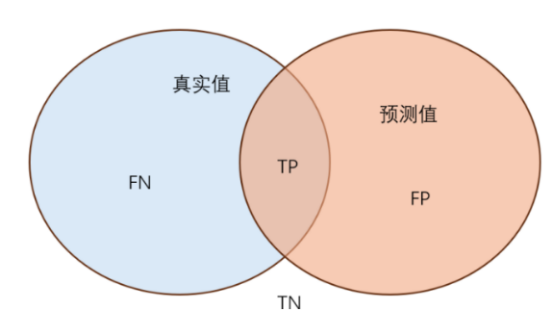
图 2-9 交并比示意图
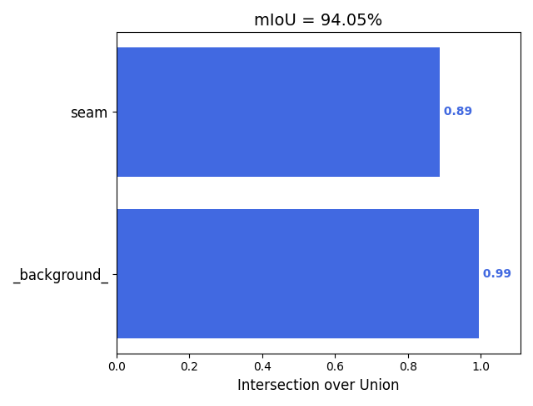
4.8 模型优化结果
论文记录的优化过程包括三步:
- 从原始 U-Net 切换到 VGG-UNet,分割准确率从约 64% 提升到约 87%。
- 引入 VGG16 预训练权重,分割准确率从约 87% 提升到约 89%。
- 将数据集从 30 张扩展到 939 张,最终分割准确率达到约 96.8%。
| VGG-UNet 的 mIoU | 原始 U-Net 的 mIoU |
|---|---|
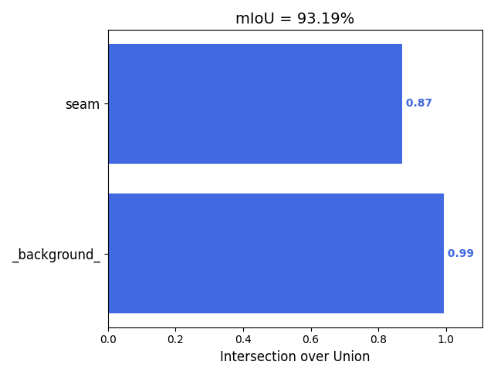 |
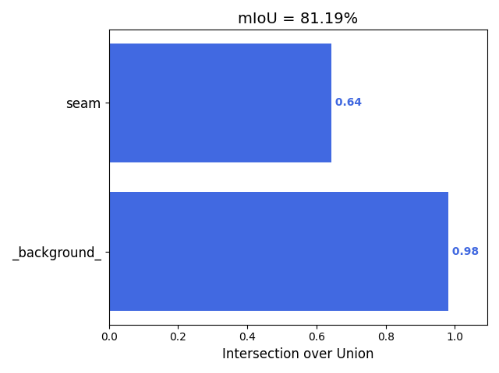 |
图 2-12 至图 2-13 模型结构优化对比
| 未使用预训练 | 使用预训练 |
|---|---|
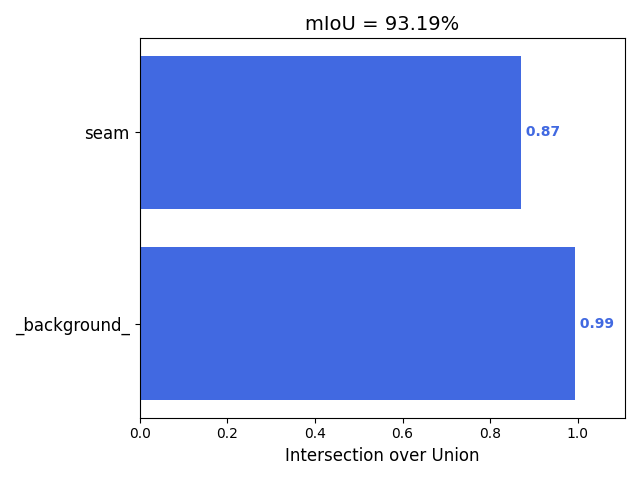 |
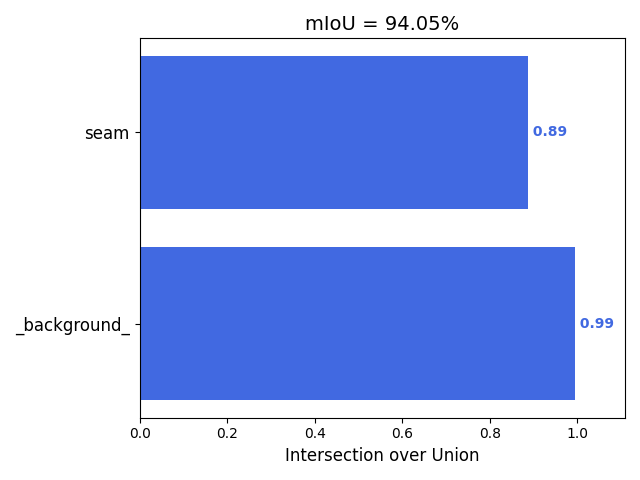 |
图 2-14 至图 2-15 预训练权重对比
| 30 张数据集 | 939 张数据集 |
|---|---|
 |
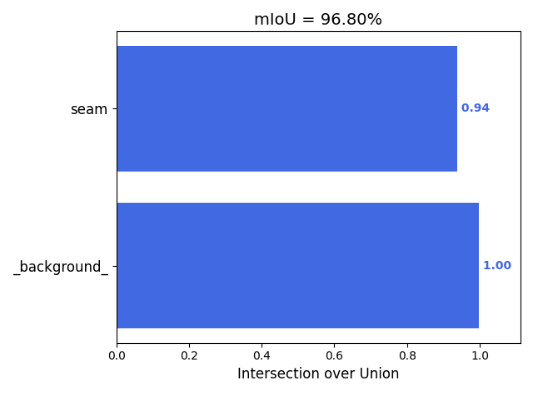 |
图 2-16 至图 2-17 数据集扩充对比
优化前后效果如下:
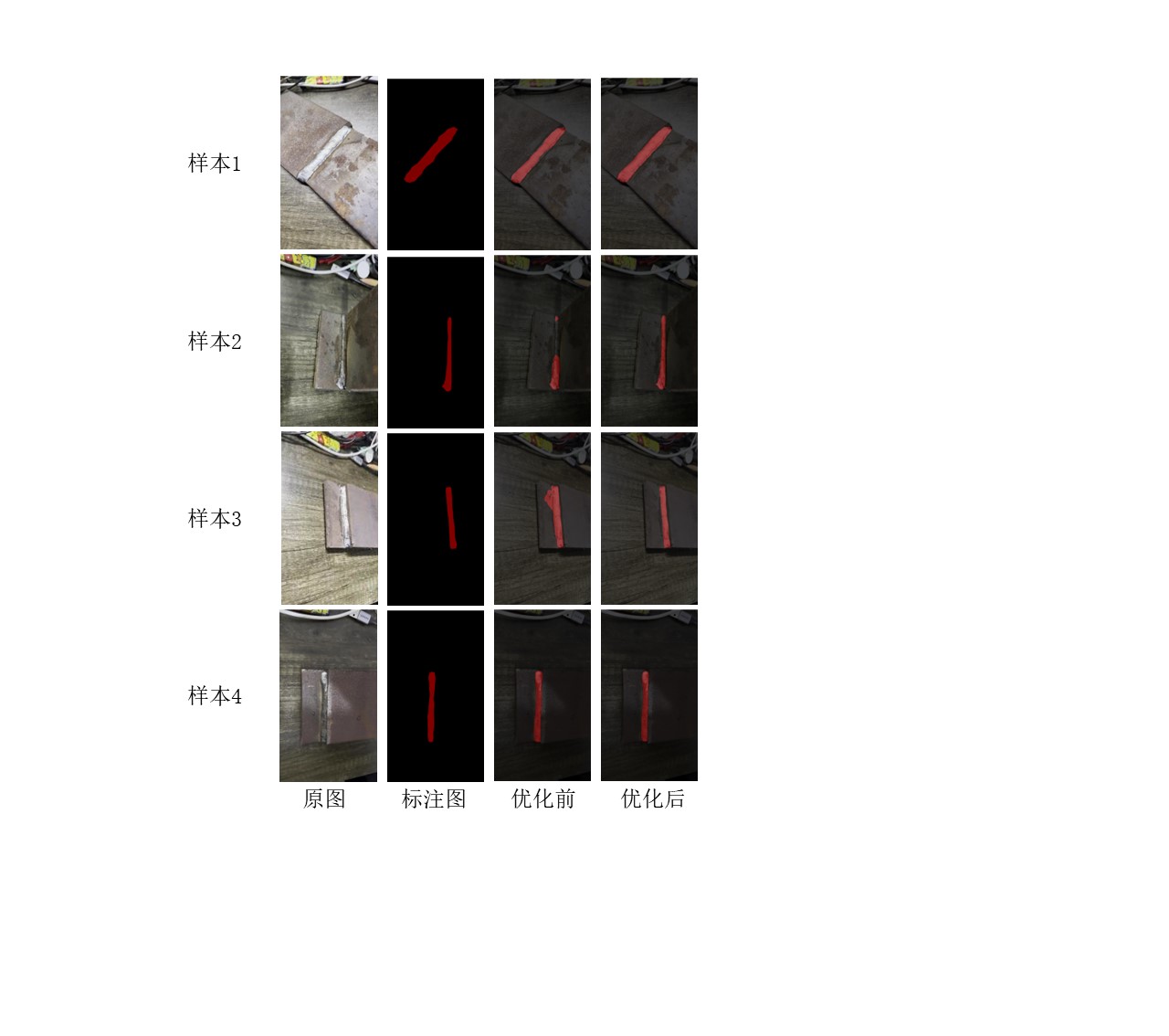
图 2-18 语义分割效果对比图
4.9 推理流程
推理入口为 predict.py,封装类为 unet.py 中的 Unet。默认配置:
| 配置项 | 默认值 |
|---|---|
model_path |
model_data/seam_unet.pth |
num_classes |
2 |
backbone |
"vgg" |
input_shape |
[512, 512] |
mix_type |
0 |
cuda |
True,但会自动降级为 torch.cuda.is_available() |
单张图像推理步骤:
flowchart TB
Input[输入图像路径] --> PIL[Image.open]
PIL --> RGB[cvtColor 转 RGB]
RGB --> Resize[resize_image 等比例缩放到 512x512]
Resize --> Tensor[归一化并转为 NCHW Tensor]
Tensor --> Net[UNet 前向推理]
Net --> Softmax[softmax 获取类别概率]
Softmax --> Crop[去除灰边区域]
Crop --> Restore[resize 回原图尺寸]
Restore --> Argmax[按像素 argmax 得到类别图]
Argmax --> Blend[类别颜色图与原图融合]
Blend --> Save[保存 segmented_image.png]
在 mix_type == 0 下,分割 mask 会映射为颜色图,再通过 Image.blend(old_img, image, 0.7) 与原图融合。融合权重含义是结果图像中分割颜色占比较高,便于在上位机中直观看到焊缝区域。
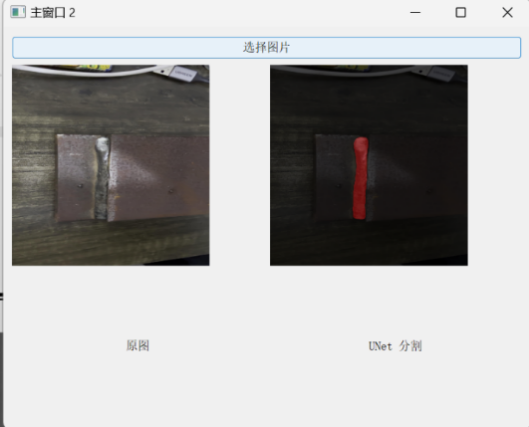
图 2-19 焊缝分割上位机效果演示
5. Qt/C++ 上位机控制模块
5.1 从 PyQt 原型到 C++ Qt 重构
论文中先使用 PyQt 快速搭建原型,再因数字孪生渲染实时性、OpenGL 交互和底层集成需要,将上位机重构为 C++ Qt。C++ Qt 的优势包括:
- 编译型语言运行效率高,适合高频界面刷新和 OpenGL 渲染。
- 直接使用 Qt SerialPort、OpenGL、信号槽等模块,减少 Python 解释器带来的开销。
- 更适合与 C++ STL 解析、底层硬件通信和桌面应用打包集成。
- 可以借助 qmake 和 macdeployqt/windeployqt 形成可分发应用包。
原型阶段使用 Qt Designer 进行界面布局绘制,形成 .ui 文件,再由代码绑定具体业务逻辑。C++ Qt 重构后仍保留这种“界面描述文件 + C++ 槽函数”的组织方式,使界面调整和逻辑实现相对分离。
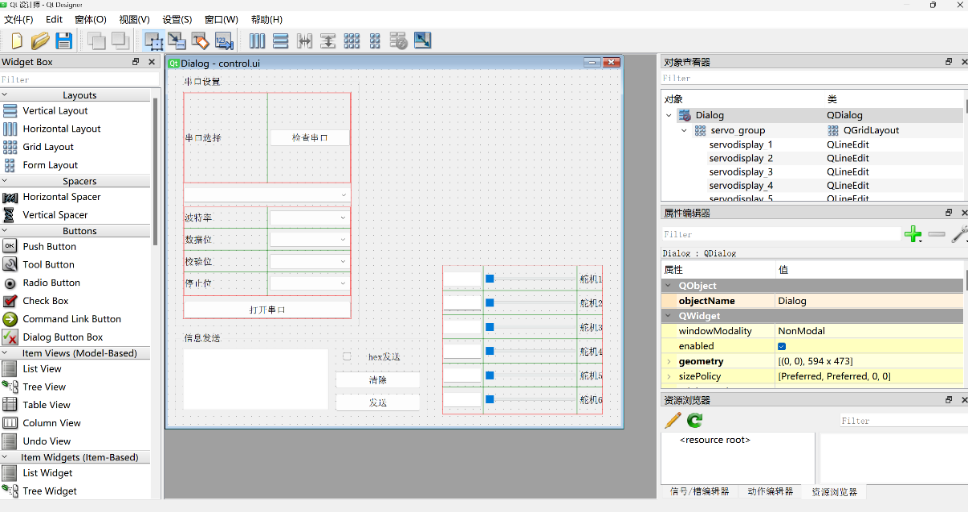
图 3-2 Qt Designer 设计界面
5.2 应用启动与窗口层级
启动入口在 main.cpp。正常模式下创建 Secinterface 对象,但 Secinterface 构造函数首先显示登录窗口 logon,而不是直接显示主界面。
sequenceDiagram
participant App as main.cpp
participant Sec as Secinterface
participant Log as logon
participant Ctrl as MainWindow
participant Seam as seamtest
App->>Sec: 创建 Secinterface
Sec->>Log: 创建并 show 登录窗口
Log->>Log: 校验 admin/admin
Log-->>Sec: emit login()
Sec->>Sec: show 二级界面
Sec->>Ctrl: 点击控制按钮后 show()
Sec->>Seam: 点击识别按钮后 show()
登录窗口使用默认账号:
username: admin
password: admin
登录状态保存使用 RuntimePaths::outputPath("config.json"),而不是写在工程源码目录中。保存内容只记录“是否记住账号/密码”的 checkbox 状态。
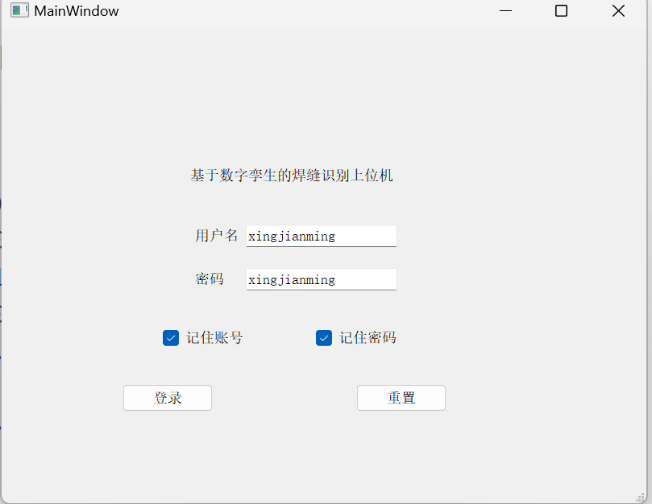
图 3-9 上位机登录界面
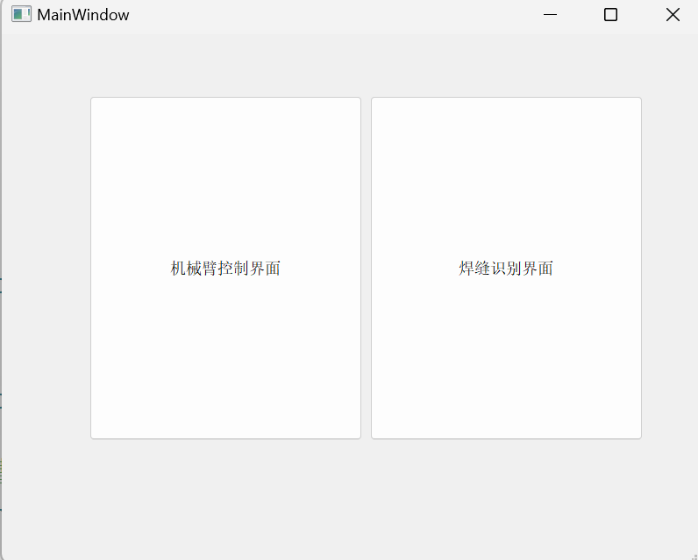
图 3-10 上位机二级界面
| 登录界面优化 | 二级界面优化 |
|---|---|
 |
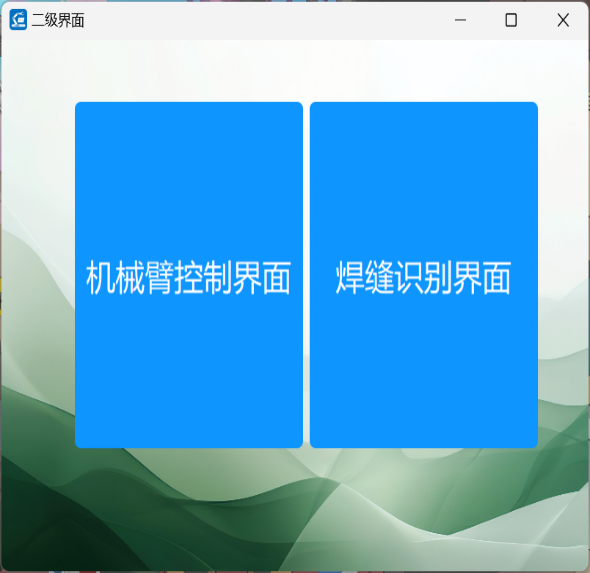 |
图 3-11 至图 3-12 登录界面与二级界面效果
5.3 串口控制逻辑
机械臂控制窗口由 MainWindow 实现,串口对象为 QSerialPort *serialPort。初始化函数 initSerialPort() 完成按钮、滑块、下拉框和事件总线信号的连接。
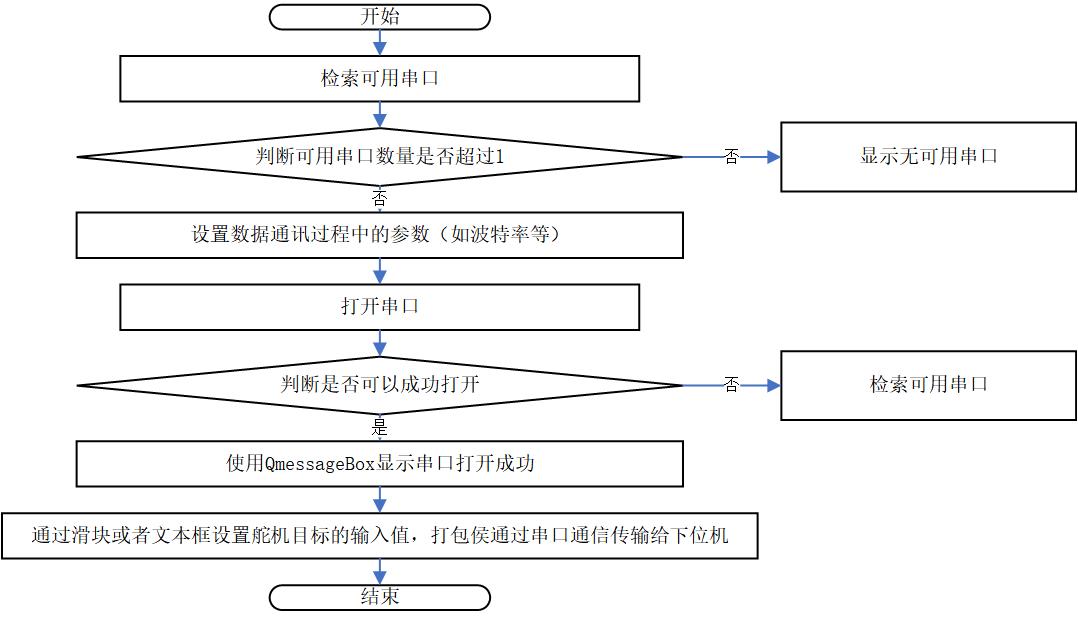
图 3-1 上位机控制逻辑图
串口控制流程如下:
- 点击“检测串口”按钮,调用
portDetect()。 QSerialPortInfo::availablePorts()返回当前系统所有串口。- 将
portName:description添加到串口下拉框。 - 点击“打开串口”按钮,调用
portOpenClose()。 - 设置串口名、波特率、数据位、校验位和停止位。
- 调用
serialPort->open(QIODevice::ReadWrite)打开串口。 - 滑块变化或文本发送触发组包,调用
sendData()写入串口。
默认串口参数:
| 参数 | 默认值 |
|---|---|
| 波特率 | 9600 |
| 数据位 | 8 |
| 校验位 | N |
| 停止位 | 1 |
界面分区示意:
| 文本交互 | 串口设置 | 舵机控制 |
|---|---|---|
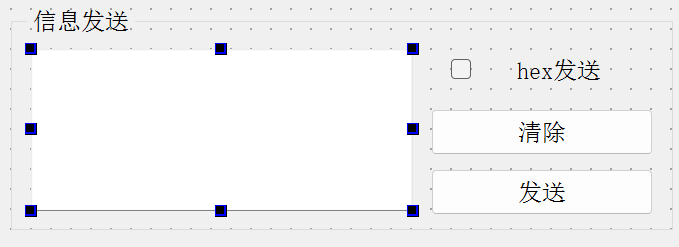 |
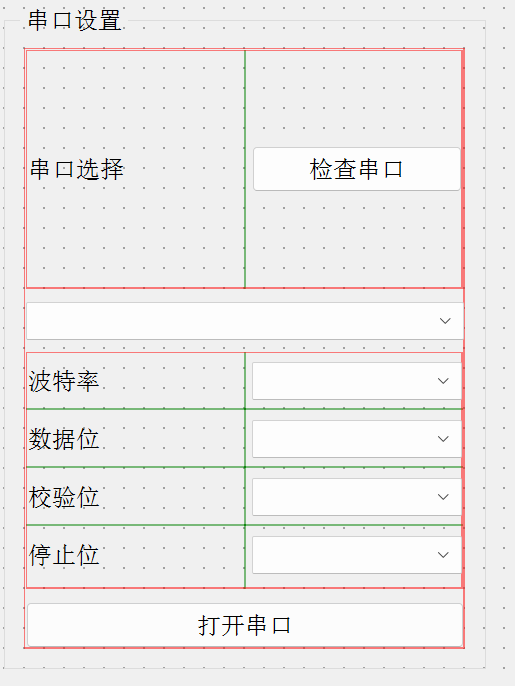 |
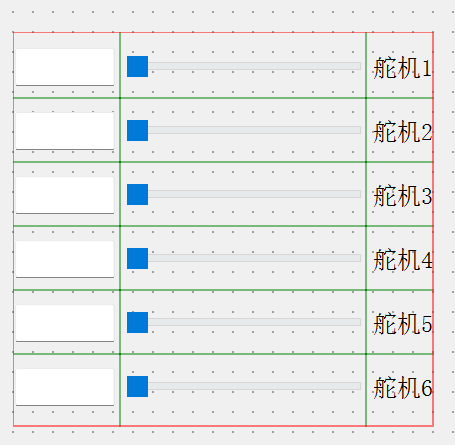 |
图 3-3 至图 3-5 控制模块界面分区
串口检测后的界面会将可用端口写入下拉框;如果没有检测到端口,则显示无可用串口提示。该流程在 PyQt 原型和 C++ Qt 重构中保持一致,只是底层从 serial.tools.list_ports 切换为 Qt 原生的 QSerialPortInfo::availablePorts()。
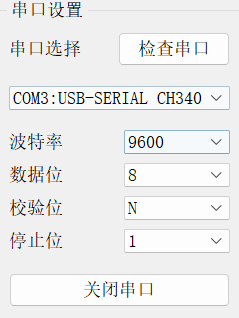
图 3-6 串口检测模块显示效果
5.4 舵机控制协议
MainWindow::showSliderValue() 在滑块变化时构建舵机控制命令。当前单舵机控制数据包格式如下:
| 字节序号 | 字段 | 当前值或来源 | 说明 |
|---|---|---|---|
| 0 | 帧头 1 | 0x55 |
固定帧头 |
| 1 | 帧头 2 | 0x55 |
固定帧头 |
| 2 | 长度 | 0x08 |
当前包长度字段 |
| 3 | 命令 | 0x03 |
舵机移动命令 |
| 4 | 舵机数量 | 0x01 |
单次控制一个舵机 |
| 5 | 时间低八位 | 0xC8 |
运动时间低位,十进制 200 |
| 6 | 时间高八位 | 0x00 |
运动时间高位 |
| 7 | 舵机 ID | sliderNumber |
1 到 6 |
| 8 | 角度低八位 | value & 0xFF |
滑块值低位 |
| 9 | 角度高八位 | (value >> 8) & 0xFF |
滑块值高位 |
论文中给出的多舵机数据长度公式为:
N = servo\_num \times 3 + 5
当前源码在滑块单舵机控制中使用固定 servo_num = 1 的等价格式。文本发送路径 sendMessage() 还支持普通文本模式和 HEX 模式:若界面 checkbox 选中,则按空格拆分十六进制字符串并逐字节转换;否则按 UTF-8 文本发送。
sendData() 中包含以下鲁棒性处理:
- 串口未打开时不发送。
- 打印发送数据包大小和十六进制内容,便于调试。
- 使用
serialPort->write(data)写入。 - 使用
waitForBytesWritten(1000)等待最多 1 秒。 - 发送失败或超时时弹窗提示。
5.5 滑块到数字孪生关节角的映射
滑块范围设置为 500 到 2500,默认值如下:
| 舵机 | 默认滑块值 |
|---|---|
| 1 | 1000 |
| 2 | 1500 |
| 3 | 1500 |
| 4 | 1500 |
| 5 | 1500 |
| 6 | 1500 |
基础映射函数为:
double MainWindow::mapRange(double value,
double inMin, double inMax,
double outMin, double outMax) {
if (value < inMin) value = inMin;
if (value > inMax) value = inMax;
return (value - inMin) * (outMax - outMin) / (inMax - inMin) + outMin;
}
即将 [500, 2500] 映射到 [-90, 90]。随后 slotJVarsValueChange() 根据关节编号做额外修正:
| 关节索引 | 修正逻辑 | 目的 |
|---|---|---|
index == 5 |
mappedValue += 90 |
补偿第五关节模型初始姿态 |
index == 3 |
mappedValue -= 90 后再 mappedValue = -180 - mappedValue |
适配第三关节 STL 坐标方向 |
index == 4 |
mappedValue = -mappedValue |
适配第四关节旋转方向 |
| 其他 | 仅线性映射 | 保持常规角度映射 |
由于 UI 滑块编号与 mRobotConfig.JVars 下标方向相反,源码使用 mappedIndex = 7 - index 写入数字孪生关节变量。
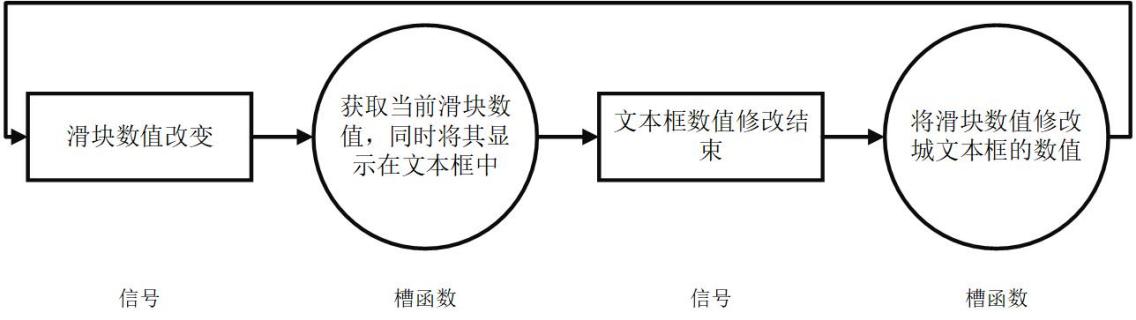
图 3-7 滑块数值与文本框数值双向交互
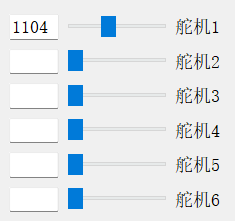
图 3-8 舵机控制模块效果显示
5.6 焊缝识别窗口与 Python 推理集成
识别窗口由 seamtest 类实现,核心函数包括:
| 函数 | 作用 |
|---|---|
selectImage() |
打开文件选择框,选择待识别图片 |
displayOriginalImage() |
将原图显示到左侧 QLabel |
processImage() |
使用 QProcess 启动 Python 推理脚本 |
displayResult() |
加载并显示 segmented_image.png |
seam_detect_success |
识别成功后发射的 Qt 信号 |
processImage() 的关键实现:
- 创建
QProcess。 - 使用
RuntimePaths::projectRoot()定位predict.py。 - 使用
RuntimePaths::pythonExecutable()定位 Python 解释器。 - 使用
RuntimePaths::outputDir()作为子进程工作目录,使输出结果写入稳定位置。 - 参数为:
predict.py <image_path>。 - 连接
readyReadStandardOutput和readyReadStandardError输出日志。 - 连接
errorOccurred捕获启动失败、崩溃、超时、读写错误等异常。 - 进程退出码为 0 时,延迟 500 ms 检查结果文件。
- 若
segmented_image.png存在,显示结果并发射seam_detect_success()。 - 使用
deleteLater()安全释放进程对象。
这种设计避免了 C++ 直接嵌入 PyTorch 推理代码的复杂性,也避免将模型推理阻塞在 UI 主流程中。
5.7 运行时路径管理
runtime_paths.cpp 解决桌面应用在源码运行、构建目录运行、.app 包内运行等不同场景下的路径定位问题。核心函数如下:
| 函数 | 作用 |
|---|---|
envValue() |
读取环境变量 |
projectRoot() |
查找包含 predict.py 的项目根目录 |
resourcePath() |
根据项目根目录拼接资源路径 |
pythonHome() |
查找 Python 环境根目录 |
pythonExecutable() |
返回 Python 可执行文件路径 |
pythonStringLiteral() |
转义路径,供 Python C API 字符串使用 |
outputDir() |
返回运行时输出目录 |
outputPath() |
拼接输出文件路径 |
路径优先级:
- 若设置了
HMI_PROJECT_ROOT,优先使用该路径。 - 否则从当前目录、应用目录、
HMI、runtime/HMI、resources/HMI、macOSResources/HMI等候选目录中寻找predict.py。 - Python 优先使用
PYTHON_EXECUTABLE,其次根据PYTHON_HOME推导,最后回退到python。 - 输出目录优先使用
HMI_OUTPUT_DIR,否则使用QStandardPaths::AppDataLocation,再回退到临时目录。
6. 数字孪生模块
6.1 机械臂对象与建模目标
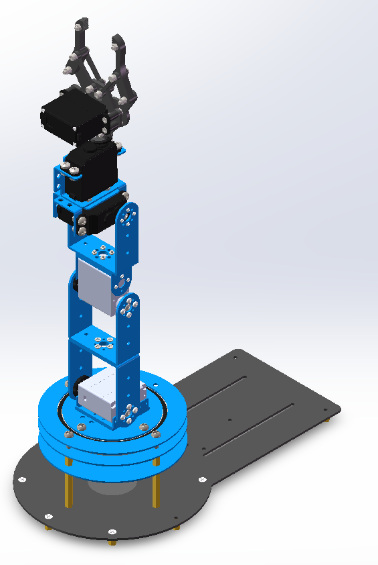
数字孪生模块基于 LeArm 六自由度机械臂。论文中通过改进 DH 参数推导正逆运动学,并在上位机中使用 STL 模型和 OpenGL 显示机械臂姿态。
| LeArm 机械臂 | 机械臂结构简图 |
|---|---|
 |
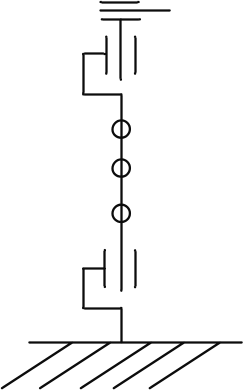 |
图 4-1 至图 4-2 LeArm 机械臂与结构简图
6.2 改进 DH 参数
坐标系搭建采用改进 DH 方法:
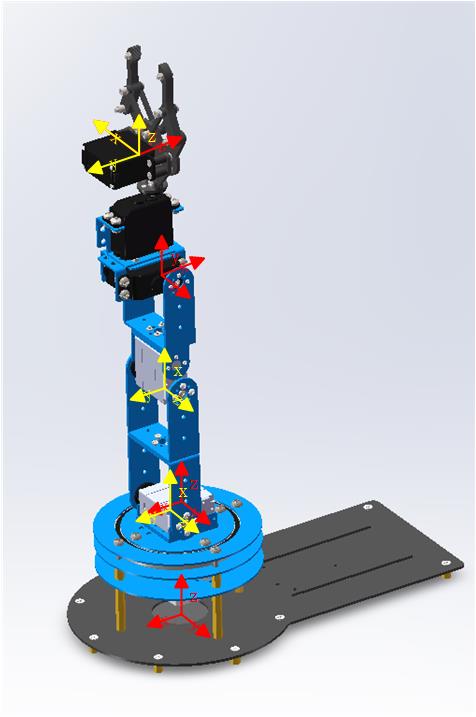
图 4-3 改进 DH 坐标系示意图
论文给出的尺寸为:
d1 = 95 mm
d2 = 9.5 mm
d3 = 104 mm
d4 = 88.47 mm
d5 = 59.28 mm
改进 DH 参数表如下:
| i | a(i-1) | alpha(i-1) | d(i) | theta(i) |
|---|---|---|---|---|
| 1 | 0 | 0 | d1 | 0 |
| 2 | d2 | -pi/2 | 0 | -pi/2 |
| 3 | d3 | 0 | 0 | 0 |
| 4 | d4 | 0 | 0 | -pi/2 |
| 5 | 0 | -pi/2 | d5 | -pi/2 |
| 6 | 0 | pi/2 | 0 | 0 |
源码中 DDR6RobotWidget::configureModelParams() 使用的渲染参数为:
mRobotConfig.d = {0, 95.0, 0.00, 0.00, 0.00, 59.28, 0.00};
mRobotConfig.JVars = {0, 0, 90, 0, -90, 0, 0};
mRobotConfig.a = {0, 0, -9.8, 104, 88.47, 0, 0};
mRobotConfig.alpha = {0, 0, 90, 0, 0, -90, 0};
这里的数组首位为占位项,实际关节从下标 1 开始。a[2] = -9.8 对应论文中 d2 = 9.5 mm 附近的结构偏置,但源码中根据 STL 坐标实际对齐做了符号和数值微调。
6.3 正运动学
改进 DH 的单级齐次变换可写为:
^{i-1}T_i =
R_X(\alpha_{i-1})
D_X(a_{i-1})
R_Z(\theta_i)
D_Z(d_i)
矩阵形式为:
^{i-1}T_i =
\begin{bmatrix}
\cos\theta_i & -\sin\theta_i & 0 & a_{i-1} \\
\sin\theta_i\cos\alpha_{i-1} & \cos\theta_i\cos\alpha_{i-1} & -\sin\alpha_{i-1} & -\sin\alpha_{i-1}d_i \\
\sin\theta_i\sin\alpha_{i-1} & \cos\theta_i\sin\alpha_{i-1} & \cos\alpha_{i-1} & \cos\alpha_{i-1}d_i \\
0 & 0 & 0 & 1
\end{bmatrix}
整机末端位姿为:
^0T_i = ^0T_1 \cdot ^1T_2 \cdot \ldots \cdot ^{i-1}T_i
在 OpenGL 渲染中,源码不直接构造矩阵对象,而是按照 DH 变换顺序调用:
glTranslatef(a, 0.0, 0.0);
glRotatef(alpha, 1.0, 0.0, 0.0);
glTranslatef(0.0, 0.0, d);
glRotatef(theta, 0.0, 0.0, 1.0);
这种做法利用 OpenGL 矩阵栈隐式累乘,实现每个连杆相对于前一连杆的级联变换。
6.4 逆运动学与验证
论文中通过矩阵对应关系求解 theta1 到 theta6 的解析表达式。逆解核心思想是:
- 利用末端齐次矩阵中的位置项先求
theta1。 - 使用姿态矩阵相关元素消去部分变量,求
theta5和theta6。 - 通过组合角
theta234处理腕部姿态。 - 利用几何关系求
theta2、theta3。 - 最后由
theta4 = theta234 - theta2 - theta3得到第四关节角。
由于机械臂逆运动学通常存在多解、奇异位形和不可达位姿,论文中记录了八组候选解,其中部分解为 NaN。这符合六自由度串联机械臂解析逆解的一般现象。
使用 Robotic Toolbox 对正逆解互相验证:
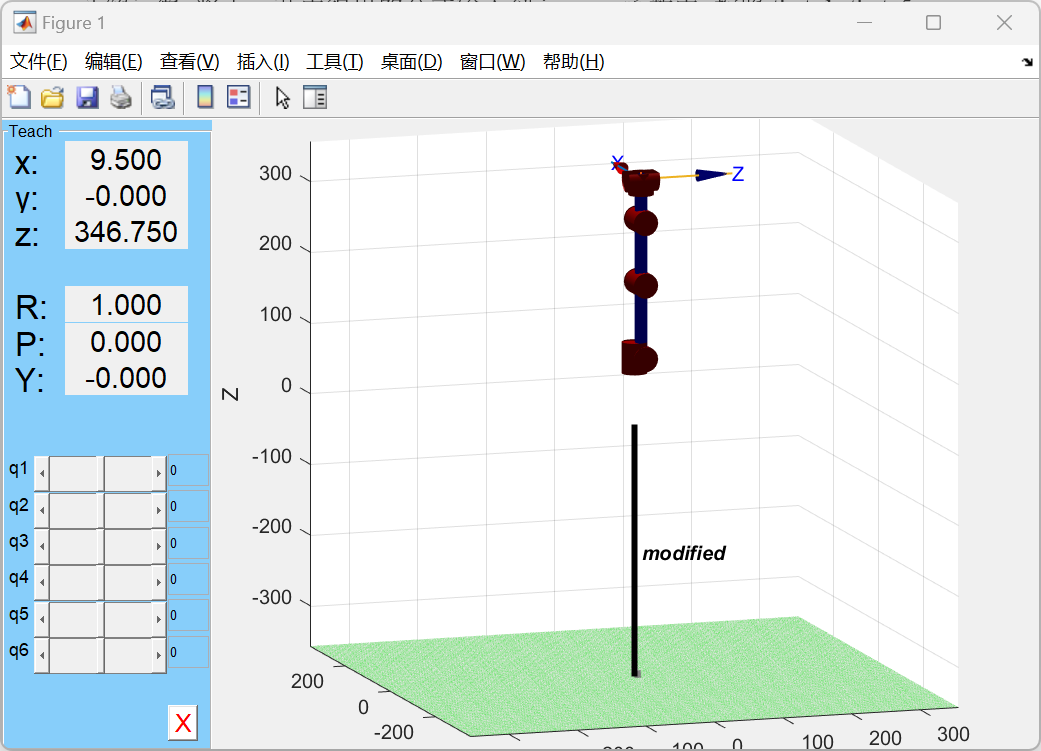
图 4-4 Robotic Toolbox 仿真图
正解测试数据:
| 输入关节角 | 末端位姿矩阵 |
|---|---|
[pi/4, -2*pi/3, -2*pi/3, 0, 2*pi/3, 0] |
[[0.7891, -0.6124, 0.0474, -9.6593], [-0.4356, -0.6124, -0.6597, -9.6593], [0.4330, 0.5000, -0.7500, 15.0000], [0, 0, 0, 1.0000]] |
逆解测试中,T2 与预设 T0 一致,说明解析逆解和正解在该测试点上互为验证。
6.5 STL 模型加载
机械臂各连杆使用二进制 STL 文件,默认路径为:
res/binary/
├── base_link.STL
├── link_1.STL
├── link_2.STL
├── link_3.STL
├── link_4.STL
└── link_5.STL
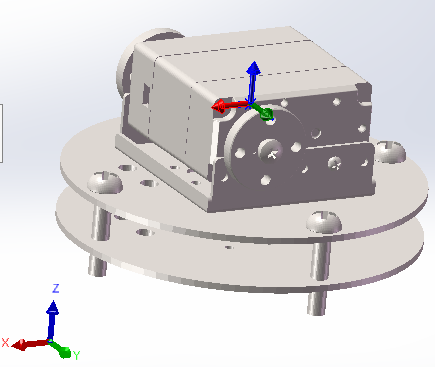
图 4-5 关节零件
STLFileLoader::loadBinaryStl() 按二进制 STL 规范解析文件:
| 字节范围 | 内容 | 大小 |
|---|---|---|
| 0-79 | 文件头 | 80 字节 |
| 80-83 | 三角面片数量 triangle_num |
4 字节 |
| 每个面片 | 法向量 + 三个顶点 + 属性字段 | 50 字节 |
单个三角面片结构:
| 字段 | 内容 | 大小 |
|---|---|---|
| normal | 3 个 float | 12 字节 |
| vertex 1 | 3 个 float | 12 字节 |
| vertex 2 | 3 个 float | 12 字节 |
| vertex 3 | 3 个 float | 12 字节 |
| attribute | 属性字节计数 | 2 字节 |
因此文件体积理论上为:
FileSize = 84 + 50 \times N_{facet}
源码一次性将文件读入内存,然后通过指针偏移解析,优点是逻辑简单、读取速度快;代价是大模型会占用较多瞬时内存。当前 LeArm 演示模型规模较小,该方案是合理的。
6.6 OpenGL 渲染管线
渲染基础类为 RRGLWidget,继承自 QGLWidget。其职责包括:
| 函数 | 作用 |
|---|---|
initializeGL() |
设置光照、深度测试、法向量归一化、背景色 |
resizeGL() |
设置视口和透视投影矩阵 |
paintGL() |
子类重写后执行每帧绘制 |
drawGrid() |
绘制地面网格 |
drawCoordinates() |
绘制世界坐标系 |
drawSTLCoordinates() |
绘制局部 STL 坐标系 |
setupColor() |
设置材质颜色 |
mouseMoveEvent() |
处理旋转、缩放、平移交互 |
STLFileLoader::draw() 使用立即模式绘制:
glBegin(GL_TRIANGLES);
for each triangle:
glNormal3f(normal.x, normal.y, normal.z);
glVertex3f(vertex0.x, vertex0.y, vertex0.z);
glVertex3f(vertex1.x, vertex1.y, vertex1.z);
glVertex3f(vertex2.x, vertex2.y, vertex2.z);
glEnd();
该方式便于学习和验证 STL 加载逻辑,但在大规模模型或高帧率场景下,可进一步升级为 VBO/VAO 缓冲对象渲染,以减少 CPU 到 GPU 的重复提交。
6.7 机械臂关节级渲染
DDR6RobotWidget 继承 RRGLWidget,负责加载各连杆 STL,并按关节顺序进行矩阵变换和绘制。
初始化视角:
z_zoom = -500;
xRot = 30 * 16;
yRot = 45 * 16;
xTran = 0;
yTran = -200;
paintGL() 中先清除颜色和深度缓冲,再依次应用观察变换:
glTranslated(0, 0, z_zoom);
glTranslated(xTran, yTran, 0);
glRotated(xRot / 16.0, 1.0, 0.0, 0.0);
glRotated(yRot / 16.0, 0.0, 1.0, 0.0);
glRotated(zRot / 16.0, 0.0, 0.0, 1.0);
glRotated(+90.0, 1.0, 0.0, 0.0);
glRotated(180.0, 1.0, 0.0, 0.0);
drawGL();
drawGL() 中按照基座、link1、link2、link3、link4、link5 的顺序绘制。每绘制一个连杆前,先执行对应的 DH 平移和旋转,再调用该连杆的 draw()。因为使用 OpenGL 当前矩阵状态,后续连杆自然继承前序关节变换。
机械臂模型状态与实物状态对比如下:
| 上位机状态 1 | 实物状态 1 |
|---|---|
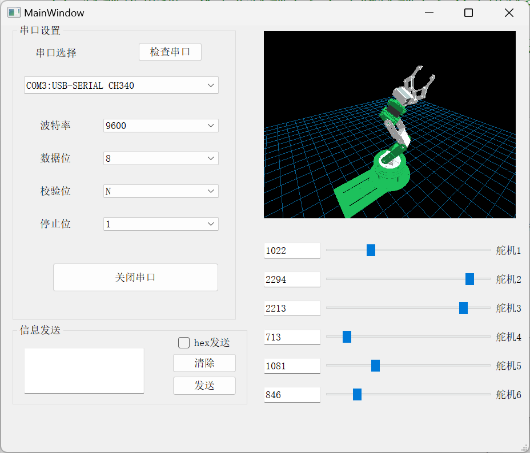 |
 |
| 上位机状态 2 | 实物状态 2 |
|---|---|
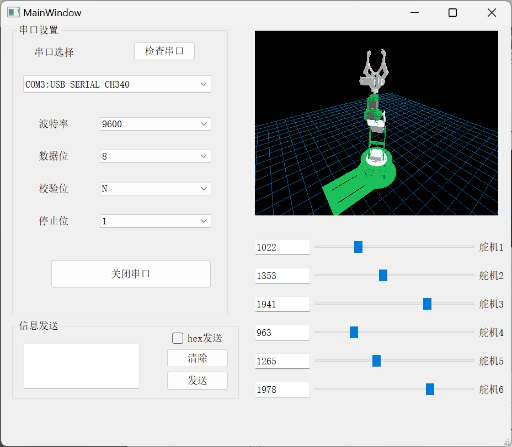 |
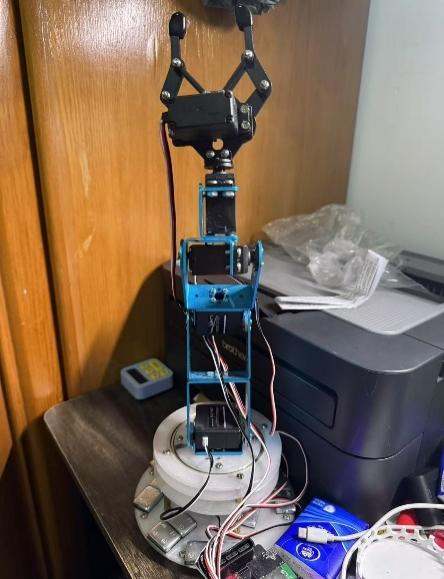 |
图 4-6 机械臂上位机模型状态与机械臂状态对比图
6.8 鼠标交互
RRGLWidget::mouseMoveEvent() 实现三种交互:
| 鼠标操作 | 控制变量 | 效果 |
|---|---|---|
| 左键拖动 | xRot、yRot |
旋转观察视角 |
| 右键拖动 | z_zoom |
缩放视图 |
| 中键拖动 | xTran、yTran |
平移视图 |
Qt 角度变量采用 角度 * 16 的存储方式,因此 paintGL() 中渲染时使用 xRot / 16.0 还原为角度。
7. 模块联动机制
7.1 识别成功到机械臂运动的事件链
焊缝识别模块与机械臂控制模块之间通过 globaleventbus 解耦。事件链如下:
sequenceDiagram
participant Seam as seamtest
participant Proc as QProcess/predict.py
participant Bus as globaleventbus
participant Main as MainWindow
participant Twin as DDR6RobotWidget
participant Serial as QSerialPort
Seam->>Proc: processImage(imagePath)
Proc-->>Seam: exitCode == 0
Seam->>Seam: 检查 segmented_image.png
Seam->>Bus: emit seam_detect_success()
Bus->>Bus: onSeamDetectionSuccess()
Bus-->>Main: emit seamDetectionSuccess()
Main->>Main: move_Learm()
Main->>Twin: 更新 6 个滑块和 JVars
Main->>Serial: 若串口打开则发送舵机指令
globaleventbus 是一个 QObject 单例:
static globaleventbus* getInstance() {
static globaleventbus instance;
return &instance;
}
seamtest 构造函数中连接:
connect(this, SIGNAL(seam_detect_success()),
globaleventbus::getInstance(),
SLOT(onSeamDetectionSuccess()));
MainWindow::initSerialPort() 中连接:
connect(globaleventbus::getInstance(),
SIGNAL(seamDetectionSuccess()),
this,
SLOT(move_Learm()));
这种发布-订阅式设计的优点是 seamtest 不需要持有 MainWindow 指针,两个窗口的生命周期和显示逻辑可以保持独立。
7.2 预设运动姿态
识别成功后,MainWindow::move_Learm() 将六个滑块设置为固定值:
| 舵机 | 目标滑块值 |
|---|---|
| 1 | 1015 |
| 2 | 1162 |
| 3 | 1757 |
| 4 | 1647 |
| 5 | 1412 |
| 6 | 1640 |
设置滑块会触发已有的 valueChanged 信号链,从而同时更新:
- UI 文本框显示。
- 数字孪生模型关节角。
- 串口发送数据包。
因此 move_Learm() 不需要直接调用 OpenGL 刷新或串口发送函数,复用了滑块控制链路。
8. 运行资源边界
本节只保留复现时需要理解的资源和路径边界,不展开命令式运行流程。项目的本地复现依赖 Qt 5、C++17 工具链、与 requirements.txt 兼容的 Python 环境、训练好的 model_data/seam_unet.pth 权重、用于测试的焊缝图片,以及有授权的 LeArm STL 文件。真实机器路径通过 scripts/hmi_local_env.example.sh 派生的本地配置维护,避免把个人路径写入仓库。
关键环境变量如下:
| 环境变量 | 作用 |
|---|---|
HMI_PROJECT_ROOT |
显式指定 HMI 工程根目录 |
PYTHON_EXECUTABLE |
指定推理使用的 Python 可执行文件 |
PYTHON_HOME |
指定 Python/Conda 环境根目录,供 Python C API 和链接器使用 |
PYTHON_VERSION |
指定 Python 版本,如 3.9 |
HMI_OUTPUT_DIR |
指定 segmented_image.png 和 config.json 的输出目录 |
HMI_TEST_IMAGE |
自测模式下的输入图片 |
HMI_INCLUDE_LOCAL_STL_ASSETS |
私有打包时是否包含本地 STL 文件 |
main.cpp 提供 --self-test 模式,用于检查核心流程。自测覆盖:
predict.py是否存在。model_data/seam_unet.pth是否存在。HMI_TEST_IMAGE是否设置且文件存在。- 默认
admin/admin登录是否发出login信号。 MainWindow是否能初始化。seamtest::processImage()是否能生成segmented_image.png。- 是否发出
seam_detect_success信号。
注意:离屏模式下 OpenGL 上下文可能受限,因此自测主要验证识别和界面初始化流程,不等同于完整 3D 渲染验收。
9. 验证与质量控制
9.1 算法验证
算法验证建议包含:
| 验证项 | 方法 | 通过标准 |
|---|---|---|
| 数据集完整性 | 检查 JPEGImages、SegmentationClass、ImageSets/Segmentation |
每个样本均有原图和 mask |
| mask 类别合法性 | 统计 mask 像素值 | 只应包含 0、1 或忽略类别 |
| 训练可运行 | 执行 train.py |
能进入训练循环并保存权重 |
| 推理可运行 | 执行 predict.py image.jpg |
生成非空 segmented_image.png |
| mIoU 评估 | 执行 get_miou.py |
输出 IoU、Recall、Precision |
| 鲁棒性 | 测试亮光、暗光、不同角度图片 | 焊缝主体连续,误检可控 |
9.2 上位机验证
上位机验证建议包含:
| 验证项 | 方法 | 通过标准 |
|---|---|---|
| 登录流程 | 输入 admin/admin |
二级界面显示 |
| 记住账号密码 | 勾选 checkbox 后重启 | config.json 生效 |
| 串口检测 | 插入/拔出设备后点击检测 | 下拉框正确刷新 |
| 串口打开关闭 | 选择可用串口后打开/关闭 | 状态切换正确 |
| HEX 发送 | 输入合法/非法 HEX | 合法发送,非法提示 |
| 滑块控制 | 拖动 6 个滑块 | 文本框、串口、3D 模型联动 |
| 图像识别 | 选择焊缝图片 | 原图和结果图正确显示 |
| 识别联动 | 推理成功 | 机械臂进入预设姿态 |
9.3 数字孪生验证
数字孪生验证建议包含:
| 验证项 | 方法 | 通过标准 |
|---|---|---|
| STL 加载 | 启动控制界面 | 所有关节模型存在,无缺失 |
| 初始姿态 | 对比实物或论文截图 | 基本姿态一致 |
| 单关节运动 | 分别拖动各滑块 | 对应关节运动方向正确 |
| 视角旋转 | 左键拖动 | 模型可旋转 |
| 缩放 | 右键拖动 | 视图距离变化 |
| 平移 | 中键拖动 | 观察中心移动 |
| 深度遮挡 | 多角度观察 | 前后关系正确,无严重穿模 |
10. 已知限制与改进方向
10.1 当前限制
- 焊缝识别结果仍停留在二维像素级分割,尚未转换为真实三维坐标。
- 分割成功后机械臂移动到固定预设姿态,而不是根据焊缝形状动态规划轨迹。
- OpenGL 渲染使用立即模式
glBegin/glEnd,适合演示但不适合大规模模型高性能渲染。 - 登录功能为演示级本地校验,不应作为生产级权限系统。
- 串口协议当前以单舵机滑块控制为主,多舵机同步控制和校验机制仍可扩展。
- STL 文件因授权边界不公开分发,复现 3D 显示需要用户自行准备合法模型文件。
- Python 依赖版本较旧,迁移到新版 PyTorch/Python 时需要重新验证训练和推理流程。
10.2 后续扩展
建议后续从以下方向完善:
- 增加相机标定和手眼标定,将二维分割结果映射到机械臂坐标系。
- 在上位机中加入焊缝中心线提取、边缘拟合和打磨轨迹生成模块。
- 将固定姿态触发改为基于识别结果的动态目标点或轨迹序列。
- 使用 VBO/VAO 或 Qt 现代 OpenGL 管线优化 STL 渲染效率。
- 增加串口协议校验、超时重试、下位机状态回读和错误状态显示。
- 引入更轻量的推理部署方式,如 TorchScript、ONNX Runtime 或 C++ 推理引擎。
- 增加数据集版本管理和实验记录,确保模型指标可追溯。
11. 源码定位表
| 技术点 | 主要文件 | 说明 |
|---|---|---|
| 应用入口与自测 | main.cpp |
正常启动 Secinterface,自测模式验证登录、推理和输出 |
| 登录窗口 | logon.cpp、logon.h、logon.ui |
默认账号密码、checkbox 状态保存 |
| 二级界面 | secinterface.cpp、secinterface.h、secinterface.ui |
控制窗口和识别窗口入口 |
| 控制窗口 | mainwindow.cpp、mainwindow.h、mainwindow.ui |
串口检测、滑块控制、舵机协议、数字孪生联动 |
| 识别窗口 | seamtest.cpp、seamtest.h、seamtest.ui |
图片选择、QProcess 推理、结果显示 |
| 事件总线 | globaleventbus.h |
识别成功事件中继 |
| 路径管理 | runtime_paths.cpp、runtime_paths.h |
项目根目录、Python 环境、输出目录定位 |
| OpenGL 基类 | rrglwidget.cpp、rrglwidget.h |
光照、投影、鼠标交互、基础绘制 |
| 机械臂孪生 | ddr6robotwidget.cpp、ddr6robotwidget.h |
STL 加载、DH 参数、关节级渲染 |
| STL 解析 | stlfileloader.cpp、stlfileloader.h |
二进制 STL 读取、三角面片绘制 |
| 推理入口 | predict.py |
命令行接收图片路径,保存 segmented_image.png |
| 推理封装 | unet.py |
加载 seam_unet.pth,执行预处理、推理和融合 |
| 网络结构 | nets/unet.py、nets/vgg.py |
VGG-UNet 和原始 U-Net 结构 |
| 训练脚本 | train.py |
冻结/解冻训练、Adam、StepLR、权重保存 |
| 数据加载 | utils/dataloader.py |
VOC 数据读取、增强、one-hot 标签 |
| 训练循环 | utils/utils_fit.py |
训练、验证、损失计算、权重保存 |
| 指标计算 | get_miou.py、utils/utils_metrics.py |
mIoU、Recall、Precision |
| 标注转换 | json_to_dataset.py |
LabelMe JSON 转 VOC 风格图像和 mask |
| 构建配置 | HMI.pro |
Qt 模块、Python 链接、源码和资源 |