
真机效果展示
| 叠毛巾任务 | 抓取任务 |
|---|---|
 |
 |
开源仓库
| 仓库 | 职责 |
|---|---|
| openpicr5 | OpenPI / VLA 适配、Dobot 策略映射、训练配置、WebSocket 策略服务和 CR5 推理客户端。 |
| DOBOT_6Axis_ROS2_V3 | Dobot CR 系列 ROS2 驱动基础,以及真机数据采集、播放、转换和安全工具相关工作。 |
| ros2_ws_xing | 优化版相机和录制启动脚本、Fast DDS 共享内存配置、高吞吐录制流程。 |
规范化技术报告
以下内容保留 CR5 真机适配报告的主体细节,包含分支事实、脚本职责、数据结构、安全检查、延迟分析、原始图片和工程结论。
CR5 面向 VLA 的真机适配报告
0. 结论摘要
本项目围绕“越疆 Dobot CR5 + 奥比中光 Astra2 RGB-D 相机 + 电动夹爪”搭建了一个面向 VLA / OpenPI 的真机闭环。整体链路已经覆盖:
- ROS2 Humble 下的 CR5 驱动启动、ServoP 伺服控制、Modbus 夹爪控制。
- 奥比中光相机启动、RGB 图像获取、相机内参检查、相机数据吞吐优化。
- Eye-to-hand 手眼标定,最终以
base_link -> camera_color_optical_frame静态 TF 发布。 - 键盘/鼠标遥操作与录制控制,遥操作侧发布机械臂目标、夹爪目标和录制指令。
- HDF5 数据采集,按相机帧为主时钟,将机械臂状态、夹爪状态插值到图像时间点。
- HDF5 到 LeRobot v2.0 数据集转换,输出 Parquet、MP4、
info.json、stats.json、episodes.jsonl、tasks.jsonl。 - 数据播放、安全检查、播放误差评估、数据集质量检查。
- OpenPI / openpicr5 中的 Dobot 数据适配、
pi0_dobot_cr3训练配置、WebSocket 推理服务端、CR5 推理客户端。
需要实事求是说明的是:
- 代码命名中大量使用
cr3,但笔记和任务目标是 CR5。这里应理解为历史命名遗留:OpenPI 配置名pi0_dobot_cr3、策略文件dobot_cr3_policy.py、转换脚本默认robot_type='dobot_cr3'并不等于硬件一定是 CR3。真机对象在笔记和推理客户端中明确为 CR5。 DOBOT_6Axis_ROS2_V3当前 checkout 的main分支主要是官方/基础代码;大量真机数据采集、播放、评估、转换代码位于远端origin/server分支。openpicr5当前main分支已经保留 CR5 推理客户端和训练配置;origin/read分支包含更激进的并行/独立进程、推理延迟分析、ServoP 延迟分析、预热等尝试;origin/single分支体现了回退到单进程/串行执行路线的尝试。- 并行推理/独立 ServoP 进程的探索没有成为最终方案。实际结果显示,非阻塞或并行执行虽然能提高表面频率,但会让模型基于机器人尚未完成动作的中间状态继续推理,轨迹出现来回抖动;独立进程能部分降低 ServoP 调用时延,但队列同步和 DDS/控制器层面的瓶颈抵消了收益。
- 当前最稳妥的真机推理方案不是“最高频率”,而是“动作块 + 阻塞 ServoP + 可解释的延迟统计 + 安全边界”。这是工程上更可靠的选择。
总体链路可以概括为:
flowchart LR
subgraph Robot["CR5 真机侧"]
Arm["Dobot CR5 ROS2 驱动"]
Gripper["Modbus 夹爪"]
Camera["Orbbec Astra2 RGB-D"]
Teleop["键盘/鼠标遥操作"]
Recorder["recorder_optimized.py"]
Player["dataset_player.py"]
Client["CR5 推理客户端"]
end
subgraph Data["数据资产"]
HDF5["HDF5 episode"]
Check["check_dataset / analyze_playback"]
LeRobot["LeRobot v2.0 数据集"]
end
subgraph OpenPI["OpenPI / openpicr5"]
Config["pi0_dobot_cr3 配置"]
Train["模型微调"]
Server["WebSocket 策略服务端"]
end
Camera --> Recorder
Arm --> Recorder
Gripper --> Recorder
Teleop --> Arm
Teleop --> Gripper
Teleop --> Recorder
Recorder --> HDF5 --> Check --> LeRobot --> Config --> Train --> Server --> Client
Camera --> Client
Arm --> Client
Client --> Arm
Client --> Gripper
HDF5 --> Player --> Arm
Player --> Gripper
2. 硬件、系统与基础 ROS2 环境
2.1 硬件组成
根据笔记,真机平台为:
- 机械臂:越疆 Dobot CR5。
- 相机:奥比中光 Astra2 RGB-D 相机。
- 夹爪:通过 Dobot 控制器的 Modbus RTU 接口控制,笔记中同时参考了 AG 系列和 DH 电爪资料。
- 主机:Ubuntu 22.04 + ROS2 Humble。
- 训练/推理服务器:OpenPI 环境,可本机或远端 GPU 服务器运行。
2.2 ROS2 基础包
机械臂侧主要依赖:
DOBOT_6Axis_ROS2_V3/dobot_bringup_v3DOBOT_6Axis_ROS2_V3/dobot_msgs_v3DOBOT_6Axis_ROS2_V3/cr5_moveitDOBOT_6Axis_ROS2_V3/dobot_demo
相机侧依赖:
OrbbecSDK_ROS2/orbbec_cameraOrbbecSDK_ROS2/orbbec_camera_msgsOrbbecSDK_ROS2/orbbec_description
基础启动命令在 examples/dobot_cr5/README.md 中写为:
或手动设置 Fast DDS:
2.3 ROS 话题
笔记记录的相机 topic 包括:
/camera/color/image_raw
/camera/color/camera_info
/camera/depth/image_raw
/camera/depth/camera_info
/camera/depth/points
/camera/ir/image_raw
/camera/ir/camera_info
/camera/gyro_accel/sample
/tf
/tf_static
VLA 采集和推理链路额外使用:
/dobot_msgs_v3/msg/ToolVectorActual # 机械臂当前末端位姿
/robot/target_pose # 遥操作/播放/推理发布的目标末端位姿
/gripper/command_update # 夹爪目标
/gripper/state_feedback # 夹爪实际反馈
/recorder/command # 录制控制:开始、保存、丢弃
其中 ToolVectorActual 后续被改造成带 header 时间戳的消息,这一点对相机与真机状态对齐非常关键。
ROS2 数据面和控制面的关系如下:
flowchart TB
CameraNode["orbbec_camera / astra2.launch.py"]
DobotDriver["dobot_bringup_v3"]
TeleopNode["data_collector4.py"]
RecorderNode["recorder_optimized.py"]
PlayerNode["dataset_player.py"]
InferClient["examples/dobot_cr5/main.py"]
EvalNode["playback_evaluator.py"]
CameraNode -->|"/camera/color/image_raw"| RecorderNode
CameraNode -->|"/camera/color/camera_info"| RecorderNode
CameraNode -->|"/camera/color/image_raw"| InferClient
DobotDriver -->|"/dobot_msgs_v3/msg/ToolVectorActual"| RecorderNode
DobotDriver -->|"/dobot_msgs_v3/msg/ToolVectorActual"| InferClient
DobotDriver -->|"/dobot_msgs_v3/msg/ToolVectorActual"| EvalNode
TeleopNode -->|"/robot/target_pose"| RecorderNode
TeleopNode -->|"/gripper/command_update"| RecorderNode
TeleopNode -->|"/recorder/command"| RecorderNode
PlayerNode -->|"/robot/target_pose"| EvalNode
PlayerNode -->|"/gripper/command_update"| EvalNode
InferClient -->|"/robot/target_pose"| EvalNode
InferClient -->|"/gripper/command_update"| EvalNode
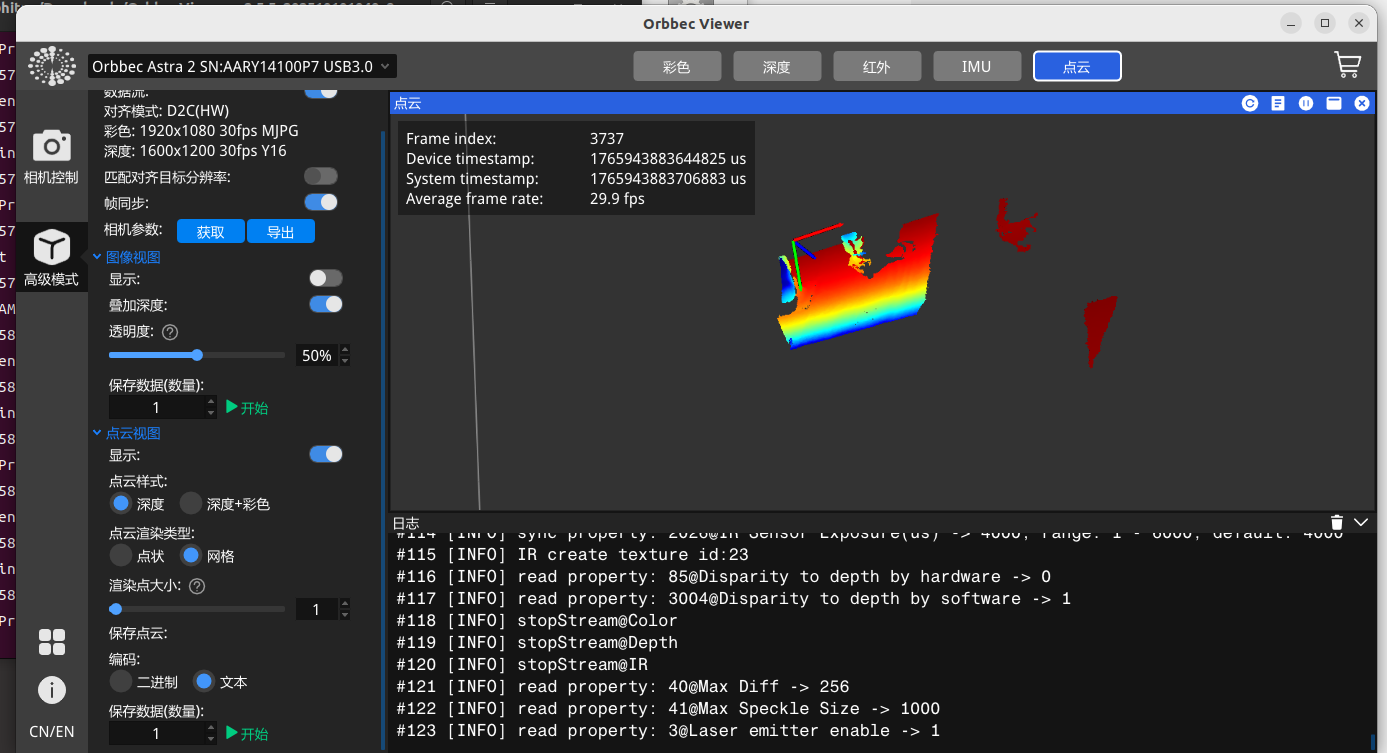
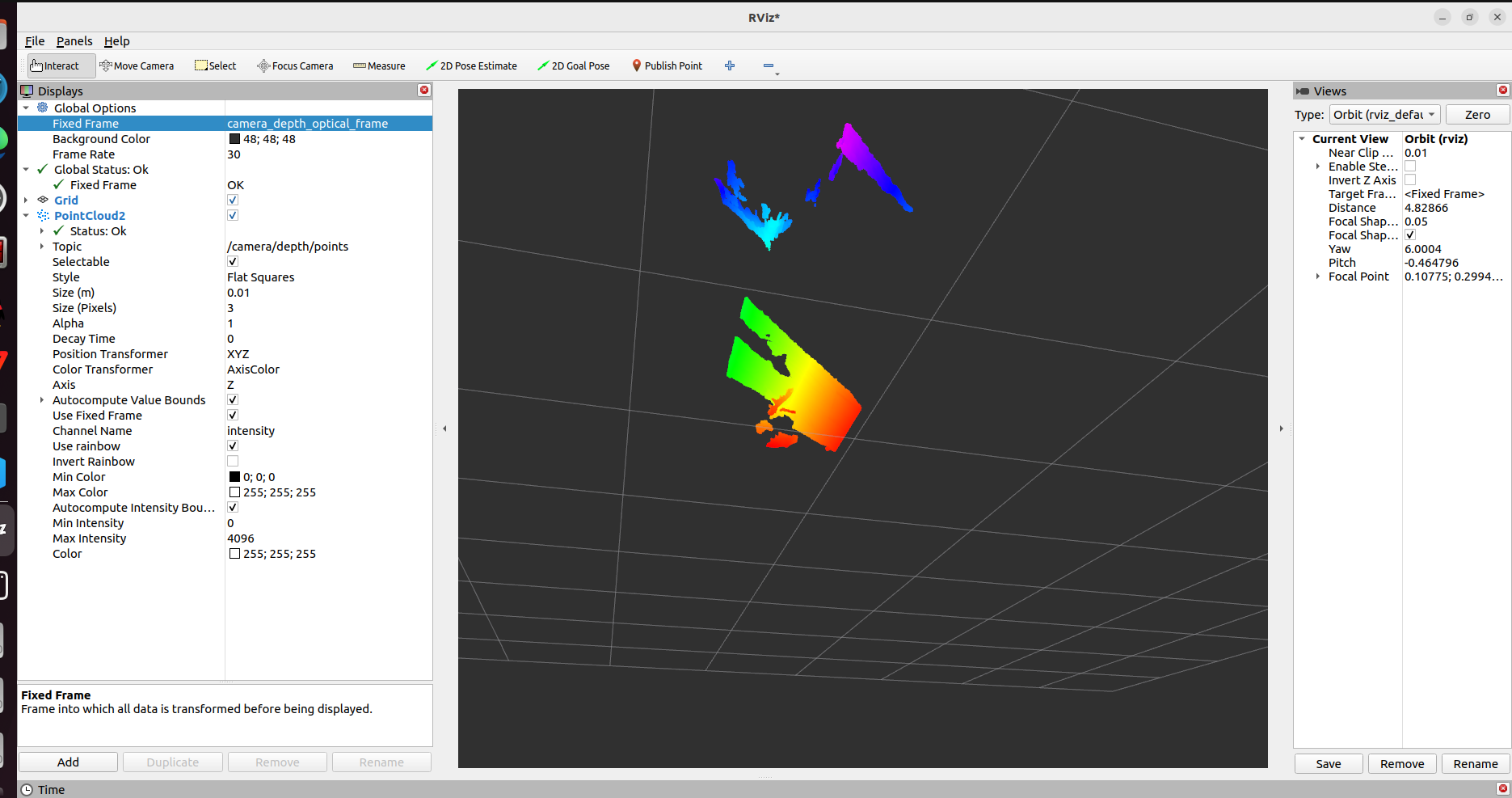
相机、RViz 与 MoveIt 部署记录:
3. 相机配置与手眼标定
3.1 相机型号和内参来源
笔记明确相机为奥比中光 Astra2。相机 SDK / ROS2 节点发布 CameraInfo,内参来自相机固件,而不是项目中手写的本地参数文件。
笔记中记录的 RGB 相机信息:
frame_id: camera_color_optical_frame
height: 720
width: 1280
distortion_model: plumb_bob
D:
0.11510352790355682
-0.3182823061943054
-0.0006209378479979932
0.00015325525600928813
0.24108868837356567
K:
836.1256713867188, 0.0, 648.8511962890625
0.0, 836.093505859375, 359.4328308105469
0.0, 0.0, 1.0
在手眼标定阶段,项目关注三个参数:
- RGB 相机内参矩阵。
- IR 相机内参矩阵。
- RGB 与 IR / 深度之间的变换关系。
笔记中说明:Astra2 的 RGB 和 IR 都基于自己的坐标系,两个相机之间的关系可通过 /tf 获取;D2C 可以由硬件或软件完成。硬件 D2C 延迟低、CPU 负担小,但受固件参数和分辨率限制;软件 D2C 更灵活,但实时负载更高。
3.2 CameraInfo 畸变参数格式问题
MoveIt calibration 或其他 ROS 视觉工具常假设 plumb_bob 模型对应 5 个畸变参数,而奥比中光 CameraInfo.d 有时发布 8 个参数。笔记明确提到:
之前的坐标结算根本没有导入相机内参,原因是因为相机内参的格式和奥比中光发布的 camera_info 格式不一致。
为此写了 fix_camera_info.py。核心逻辑是:
if msg.distortion_model == 'plumb_bob' and len(msg.d) != 5:
msg.d = list(msg.d[:5])
这里有一个工程风险:输入和输出使用同名 topic 在 ROS2 中通常需要谨慎处理,避免同名订阅/发布造成混乱。更稳妥方式是让相机驱动发布到 raw topic,再由 fixer 发布标准 topic,例如:
/camera/color/camera_info_raw -> /camera/color/camera_info
但笔记中实际命令是同名覆盖,报告中只能如实记录。
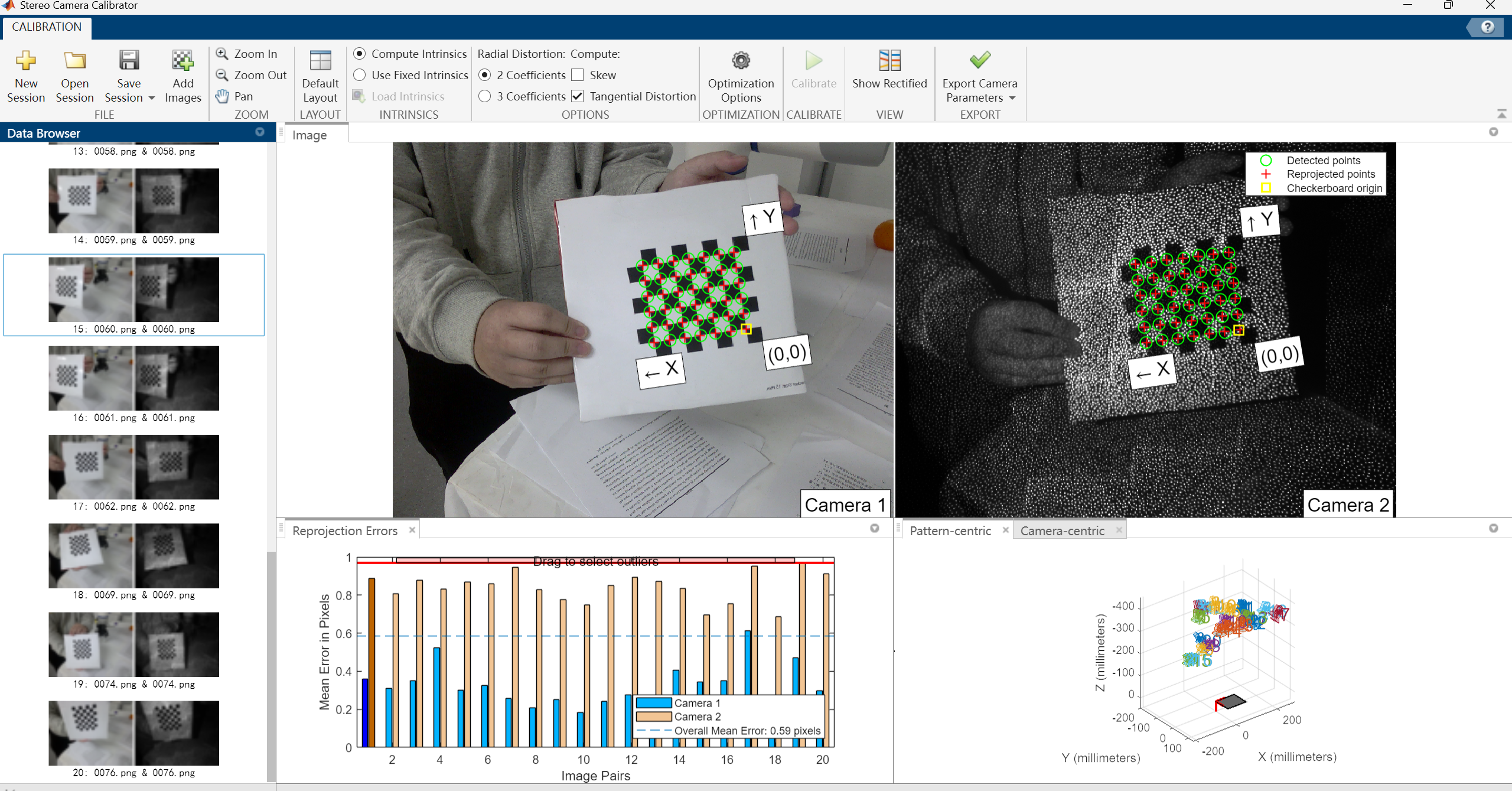
3.3 内参标定方法与精度判断
笔记中尝试过:
- ROS
camera_calibration。 - MATLAB 标定工具。
- 使用标定板图片。
- 关闭 IR projector 后再拍摄,因为红外投射会在图像上造成很多光点,影响角点提取。
准确性评估标准使用重投影误差:
- 0.1 到 0.5 pixel:工业应用中比较优秀。
- 大于 1.0 pixel:不可信,建议重拍或检查模糊、反光、标定板质量。
笔记中对 MATLAB 标定的结论比较务实:MATLAB 可以剔除重投影误差高的数据后重新标定,但当前的主要瓶颈是标定板和拍摄条件。
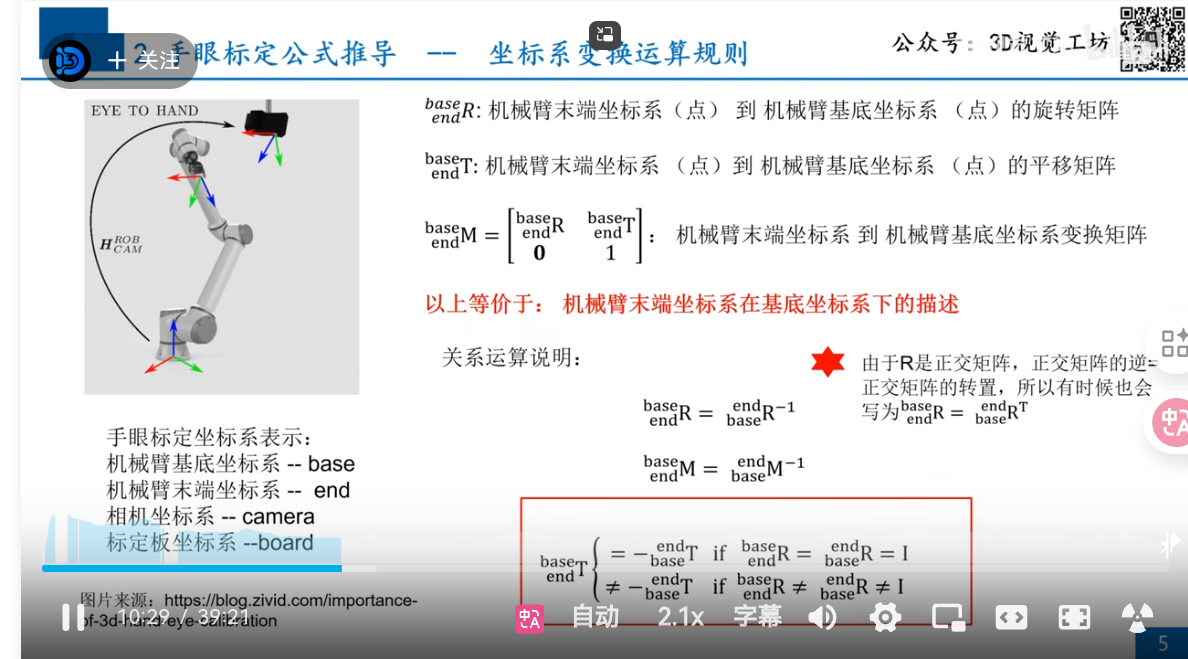
3.4 Eye-to-hand 手眼标定
CR5 当前采用眼在手外(Eye-to-hand)配置。目标是得到:
base_link -> camera_color_optical_frame
笔记中提到两类方法:
- 早期近似方法:不用标定板,使用两个离得很近的点,通过最小二乘估计基座与相机坐标系关系。结论是“末端固定状态下问题不大”,但不是严格标定。
- MoveIt calibration:RViz 插件,支持切换不同手眼算法,不需要手动获取标定板到 link6 的转换关系。
最终保存的 camera_base.launch.py 内容为:
""" Static transform publisher acquired via MoveIt 2 hand-eye calibration """
""" EYE-TO-HAND: base_link -> camera_color_optical_frame """
Node(
package="tf2_ros",
executable="static_transform_publisher",
output="log",
arguments=[
"--frame-id", "base_link",
"--child-frame-id", "camera_color_optical_frame",
"--x", "-0.777506",
"--y", "-0.330606",
"--z", "0.455513",
"--qx", "-0.489589",
"--qy", "0.703917",
"--qz", "-0.421769",
"--qw", "0.294811",
],
)
这里单位是 ROS TF 的米制平移,四元数表示姿态。该静态变换用于将相机坐标系下的点转换到机械臂基座坐标系,是后续视觉抓取、点云理解、VLA 图像/动作一致性的空间基础。
手眼标定的坐标链路如下:
flowchart LR
World["真实桌面 / 标定板"]
CameraFrame["camera_color_optical_frame"]
Base["base_link"]
Tool["link6 / tool"]
Gripper["夹爪末端"]
World -->|"RGB 图像 / 深度 / 点云观测"| CameraFrame
CameraFrame -->|"MoveIt calibration 得到静态 TF"| Base
Base -->|"Dobot 正运动学与反馈"| Tool
Tool -->|"工具坐标偏置"| Gripper
Base -->|"ServoP 目标位姿"| Tool
手眼标定过程截图:
3.5 手眼标定当前结论
笔记中的最终表述是:
- MoveIt calibration 方法目前“感觉可以接受”。
- 但“目前还是有 bug,重投影误差太大”。
- 要提高精度,应从标定板和拍摄流程入手:
- 放大标定图案。
- 使用更高精度测量工具。
- 选择更合适的标定位置。
- 关闭 IR projector 或改善红外照明条件。
因此,报告不能把当前手眼标定写成“高精度完成”。更准确的结论是:当前有可用的静态 TF,可以支撑固定相机视角下的 VLA 数据采集和推理,但若要做基于深度点云的精确三维抓取,还需要重新做高质量标定和误差评估。
4. 遥操作与摇操代码
4.1 遥操作方案来源
笔记中参考了:
- Hugging Face LeRobot hardware integration。
- XLeRobot 的键盘遥操作示例。
- OpenTeleVision / Meta Quest3 的 VR 方案。
当前真正落地的主线是键盘/鼠标遥操作,VR 仍属于参考或探索方向。
origin/server 分支中相关文件包括:
dobot_demo/dobot_demo/data_collector4.pyexample/4_xlerobot_teleop_keyboard.pyexample/8_vr_teleop_with_dataset_recording.pyexample/dobot_teleop_refined.py
4.2 data_collector4.py 架构
data_collector4.py 是遥操作和数据采集控制的核心脚本之一。它不是单纯的“键盘控制”,而是同时承担:
- 机械臂 ServoP 控制。
- 夹爪 Modbus 控制。
- 机械臂目标状态发布。
- 夹爪目标和反馈状态发布。
- 数据录制开始/保存/丢弃指令发布。
脚本中的 ROS 节点为:
class DobotRosWrapper(Node):
...
它创建的服务客户端包括:
| 类别 | 服务接口 |
|---|---|
| 机器人使能与状态 | EnableRobot、ClearError、SpeedFactor、Sync |
| 运动控制 | MovJ、MovL、ServoJ、ServoP |
| 状态读取 | GetPose、GetAngle |
| 夹爪 Modbus | ModbusCreate、ModbusClose、SetHoldRegs、GetHoldRegs |
它发布:
/robot/target_pose
/gripper/command_update
/gripper/state_feedback
/recorder/command
4.3 夹爪控制
夹爪通过 Dobot 控制器的 Modbus 接口控制:
- IP:
127.0.0.1 - 端口:
60000 - slave_id:
1 - RTU 模式:
is_rtu = 1
常用寄存器:
256: Enable,使能寄存器
257: Force/Speed,力度/速度
259: Target position,目标位置
514: Current position,当前位置反馈
GripperComm 负责底层寄存器读写,GripperManager 作为独立线程负责:
- 鼠标按下期间按增量改变虚拟夹爪位置。
- 非阻塞写 Modbus 指令。
- 松开后读取实际位置,更新当前状态。
- 自动模式下由程序设置目标位置。
笔记中记录的一个实际问题是:夹爪真实读取频率较低,目标是 50Hz 或 100Hz,但实际 Modbus 回读常在 10Hz 左右。因此后续播放和采集代码中加入了线性插补,让低频夹爪反馈能以更高频率发布。
4.4 录制控制快捷键
data_collector4.py 中录制控制通过 /recorder/command 发布 Int32:
1:开始录制。2:停止并保存。0:停止并丢弃。
笔记和代码中还体现了一个重要的安全/一致性改动:开始和结束录制时,机械臂先回到初始位置,再发布录制开始或保存指令。这能减少 episode 起止状态不一致,也减少播放时起点突变的风险。
5. 数据采集链路
5.1 采集目标
面向 VLA / OpenPI 的数据采集目标不是简单录视频,而是同步记录:
- 图像:相机 RGB 帧。
- 状态:机械臂实际末端 6D 位姿。
- 动作:遥操作/控制器发出的目标末端 6D 位姿。
- 夹爪状态:实际夹爪开度。
- 夹爪动作:目标夹爪开度。
- 时间戳:用于对齐每一帧。
- 相机内参:用于后续视觉几何或检查。
最终 HDF5 结构如下:
observations/images/color uint8, [N, H, W, 3]
observations/images/depth 可选, [N, H, W]
observations/robot_current float32, [N, 6]
actions/robot_target float32, [N, 6]
observations/gripper_current float32, [N, 1]
actions/gripper_target float32, [N, 1]
timestamp float64, [N]
camera/intrinsics float32, [3, 3]
attrs:
sim = False
total_frames = N
sync_method = FastBinarySearchInterpolation
sync_strategy = async_processing_minimal_locking
camera_frequency_hz = 30
robot_frequency_hz = 100
optimized = True
5.2 采集数据来源
录制器订阅:
/recorder/command
/camera/color/camera_info
/camera/color/image_raw
/camera/depth/image_raw # 可选
/dobot_msgs_v3/msg/ToolVectorActual
/robot/target_pose
/gripper/state_feedback
/gripper/command_update
机械臂状态一般由 Dobot 驱动反馈节点发布,目标状态由遥操作/播放/推理客户端主动镜像发布。这样数据集中可以同时保存“实际状态”和“动作命令”,避免只记录执行后的状态而丢掉监督学习的目标。
5.3 recorder_optimized.py 架构
ros2_ws_xing/recorder_optimized.py 的设计目标是解决原始采集中的丢帧和 CPU 负载问题。
优化点:
- 回调函数只做轻量入队,不在 ROS 回调里做图像转换和 HDF5 写入。
- 独立 processing thread 处理待录制帧。
- 用
deque(maxlen=...)保存短时间窗口内的有序消息。 - 用二分查找对齐时间戳,避免线性扫描。
- 对机械臂和夹爪状态做线性插值。
- 默认不录深度图,因为深度图转换和压缩成本较高。
- 保存 HDF5 时启用 gzip 压缩和 chunk。
关键缓冲配置:
self.msg_buffer = {
'color': deque(maxlen=60),
'depth': deque(maxlen=60) if enable_depth else None,
'robot_current': deque(maxlen=200),
'robot_target': deque(maxlen=200),
'gripper_current': deque(maxlen=200),
'gripper_target': deque(maxlen=200),
}
以相机帧时间为 reference time:
reference_time = color_msg.header.stamp
robot_current = interpolate(robot_current_buffer, reference_time)
robot_target = interpolate(robot_target_buffer, reference_time)
gripper_current = interpolate(gripper_current_buffer, reference_time)
gripper_target = interpolate(gripper_target_buffer, reference_time)
因此,数据集帧率等于实际保留下来的相机帧率。
采集时序可以理解为:
sequenceDiagram
participant Cam as 相机 RGB
participant Arm as CR5 状态反馈
participant Grip as 夹爪反馈
participant Teleop as 遥操作目标
participant Rec as recorder_optimized.py
participant H5 as HDF5 episode
Cam->>Rec: color image + header.stamp
Arm->>Rec: ToolVectorActual + header.stamp
Grip->>Rec: gripper state + time
Teleop->>Rec: robot target / gripper target
Rec->>Rec: 以图像时间为 reference_time
Rec->>Rec: 二分查找前后样本
Rec->>Rec: 线性插值 robot / gripper
Rec->>H5: 写入 image, state, action, timestamp
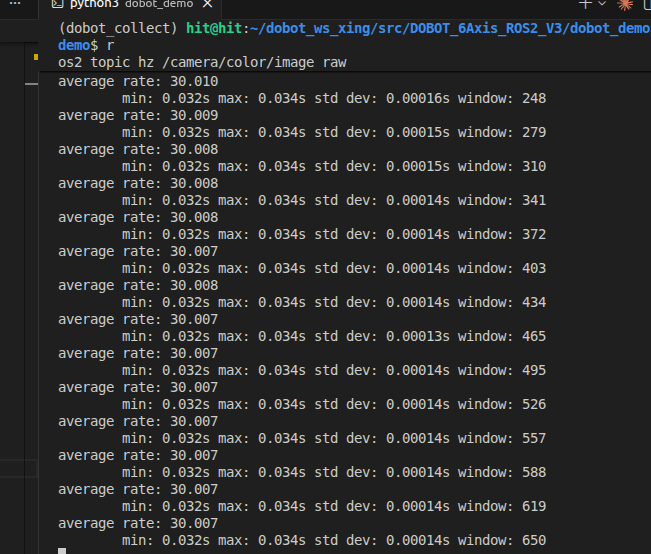
5.4 相机帧率与共享内存优化
笔记中记录了非常典型的问题:
- 目标相机帧率:30Hz。
- 启动控制和录制节点后,实际相机帧率掉到约 20Hz。
- 初始数据集丢帧率可达 27.15%,最大间隔可达 899.75ms,质量等级为差。
原始丢帧分析:
实际帧数: 660
录制时长: 30.21 秒
期望帧数: 906
丢帧率: 27.15%
平均间隔: 45.84 ms
最大间隔: 899.75 ms
标准差: 73.11 ms
VLA训练适用性: 差,不建议使用
优化方式是 Fast DDS 共享内存:
相机启动时只开 RGB,关闭深度、IR、点云:
camera_recorder_optimized.launch.py 中对应参数:
color_width = 640
color_height = 480
color_fps = 30
enable_depth = false
enable_ir = false
enable_point_cloud = false
共享内存优化后的笔记结果:
实际帧数: 796
录制时长: 27.26 秒
期望帧数: 817
丢帧数量: 21
丢帧率: 2.57%
平均间隔: 34.29 ms
最大间隔: 99.98 ms
标准差: 6.29 ms
VLA训练适用性: 良好,可谨慎使用
另一个 episode:
总帧数: 1125
总时长: 39.39 秒
平均帧率: 28.6 Hz
丢帧率: 4.74%
最大间隔: 199.97 ms
位置突变正常
旋转突变正常
夹爪变化正常
发现 3 个高速运动点
数据集基本可用,建议谨慎播放
结论:共享内存解决了主要的数据吞吐瓶颈,但并不能保证完全 0 丢帧。当前数据质量可以支持部分训练/验证,但高质量 VLA 训练仍建议进一步筛选 episode。
数据录制与播放总览图:
录制性能、同步代码与日志记录:


6. 相机与真机数据对时
6.1 为什么不能直接用同步器硬对齐
笔记中尝试过直接时间同步,但结论是:
直接使用时间对齐会丢很多图片,导致视频只有 20Hz,所以考虑采用线性拟合中间不满时间要求的点,实现不丢帧。
原因是各数据源频率不同:
- 相机:目标 30Hz,实际 25 到 30Hz 波动。
- 机械臂反馈:约 100Hz。
- 机械臂目标:由控制循环发布,可接近 100Hz。
- 夹爪目标:可较高频发布。
- 夹爪实际:Modbus 读取常约 10Hz。
如果使用严格 ApproximateTimeSynchronizer,任何一个低频源或抖动源没落在时间窗内,整帧图像都会被丢掉。这对 VLA 训练更糟,因为图像是核心观测。
6.2 当前对时策略
当前策略是:
- 以相机 RGB 图像帧为基准。
- 相机帧到达时记录其
header.stamp。 - 对机器人状态和目标状态用二分查找找到前后两个样本。
- 做线性插值。
- 对夹爪状态也做线性插值。
- 若必要数据缺失,则跳过该帧。
这样做的优点:
- 尽量保留图像帧。
- 让每个训练样本都拥有同一时间点的图像、状态、动作。
- 对高频机械臂数据来说插值误差较小。
缺点:
- 对夹爪真实反馈这类低频、非线性、带机械滞后的信号,线性插值只是近似。
- 如果相机时间戳本身不稳定,插值不能消除相机侧抖动。
- 对动作和状态之间的执行延迟没有自动建模,训练时仍可能学到“命令-到达”之间的 gap。
对齐策略的关键不是让所有消息同一时刻到达,而是以图像帧时间重采样其他信号:
flowchart LR
ImageTime["图像帧 t_img"]
RobotBefore["robot t0"]
RobotAfter["robot t1"]
GripBefore["gripper t0"]
GripAfter["gripper t1"]
RobotInterp["robot(t_img)"]
GripInterp["gripper(t_img)"]
Sample["训练样本: image(t_img), state(t_img), action(t_img)"]
RobotBefore --> RobotInterp
RobotAfter --> RobotInterp
GripBefore --> GripInterp
GripAfter --> GripInterp
ImageTime --> RobotInterp
ImageTime --> GripInterp
ImageTime --> Sample
RobotInterp --> Sample
GripInterp --> Sample
6.3 ROS 时间选择
笔记特别强调 ROS2 时间:
RCL_SYSTEM_TIME:墙上时间,可被 NTP 或手动改时影响。RCL_STEADY_TIME:单调时间,适合测耗时。RCL_ROS_TIME:ROS 时间,use_sim_time=false时等同系统时间,仿真时跟随/clock。
当前采集以 ROS 消息 header 时间戳为主,因此所有发布目标状态的节点必须使用同一套 ROS 时间来源。若一个节点使用系统时间、另一个节点使用仿真时间,数据会直接不可对齐。
6.4 推理时的对时尝试
openpicr5 origin/read 分支有“增加对时功能,获取同一时刻的动作与图像”的提交。后续又有“取消对时”的提交,说明严格对时在推理客户端中并未稳定保留。
这与数据采集结论一致:真机闭环中严格等待同一时刻数据会降低吞吐、放大延迟。最终更实用的策略是:
- 采集阶段以图像为主时钟,对状态插值。
- 推理阶段使用最新可用图像和最新可用 robot state 构建 observation。
- 对延迟做日志统计,而不是让控制链路阻塞等待完美同步。
7. 数据集质量与安全性校验
7.1 check_dataset.py
origin/server 中的 check_dataset.py 是综合检查工具,覆盖:
- 数据完整性。
- 丢帧率。
- 时间间隔统计。
- 工作空间限制。
- 位置/旋转/夹爪突变。
- 速度阈值。
- VLA 训练适用性评级。
默认安全阈值:
MAX_POSITION_JUMP = 50.0 # mm
MAX_ROTATION_JUMP = 10.0 # deg
MAX_GRIPPER_JUMP = 200.0
MAX_VELOCITY = 100.0 # mm/s
WORKSPACE_X_MIN = -600.0
WORKSPACE_X_MAX = 600.0
WORKSPACE_Y_MIN = -600.0
WORKSPACE_Y_MAX = 600.0
WORKSPACE_Z_MIN = -100.0
WORKSPACE_Z_MAX = 600.0
丢帧评级:
- 丢帧率 < 1%:优秀,可直接用于 VLA 训练。
- 1% 到 5%:良好,建议检查分布,可谨慎使用。
- 5% 到 10%:一般,建议过滤严重片段或重新录制。
-
10%:差,不建议使用。
质量与安全检查的决策链如下:
flowchart TD
Load["加载 HDF5 episode"]
Integrity["完整性检查: 字段、帧数、shape"]
Timing["时间检查: fps、丢帧率、最大间隔"]
Bounds["空间与速度检查: 工作空间、跳变、速度"]
Rating{"VLA 训练适用性"}
Good["优秀/良好: 可进入转换和训练候选集"]
Warn["一般: 标记问题片段或慢速播放复核"]
Bad["较差: 不建议训练,优先重录"]
Playback["播放前起点安全检查"]
MoveJ["MovJ 自动移动到起点"]
Servo["ServoP 播放 / 评估"]
Load --> Integrity --> Timing --> Bounds --> Rating
Rating -->|"< 5% 丢帧且无严重越界"| Good
Rating -->|"5%-10% 或局部异常"| Warn
Rating -->|"> 10% 丢帧或严重突变"| Bad
Good --> Playback
Warn --> Playback
Playback -->|"起点差异超阈值"| MoveJ --> Servo
Playback -->|"起点接近"| Servo
7.2 播放前安全检查
dataset_player.py 中新增了播放前安全检查。问题场景是:机械臂当前位置和数据集第一帧差距很大,如果直接 ServoP 到第一帧,机械臂可能突然大幅移动。
检查逻辑:
position_threshold = 50.0 # mm
rotation_threshold = 10.0 # deg
pos_diff = norm(current_pose[:3] - target_pose[:3])
rot_diff = norm(current_pose[3:] - target_pose[3:])
如果超阈值,交互提供三个选项:
- 自动移动到起始位置。
- 取消播放,手动调整。
- 忽略警告,强制播放。
自动移动使用 MovJ,不是 ServoP:
- 关节空间运动更适合起始位置迁移。
- 默认速度 50%。
- 30 秒超时。
其中 --no-safety-check 仅应在确认当前位置与起点非常接近时用于调试。
7.3 播放质量评估
播放质量评估由两个脚本构成:
playback_evaluator.py:播放时录制目标状态和实际状态。analyze_playback.py:离线计算误差统计。
playback_evaluator.py 订阅:
/robot/target_pose
/dobot_msgs_v3/msg/ToolVectorActual
/gripper/command_update
/gripper/state_feedback
输出:
playback_eval/evaluation_X.hdf5
评估器支持时间偏移补偿:
time_offset > 0 时:
目标位置查找 reference_time - time_offset
实际位置使用 reference_time
笔记中记录过 737ms 的时间偏移补偿,也记录了 --time-offset 700 的建议。这说明机械臂执行 ServoP 命令存在可观响应延迟,若不补偿,动态误差会混入稳态跟踪误差。
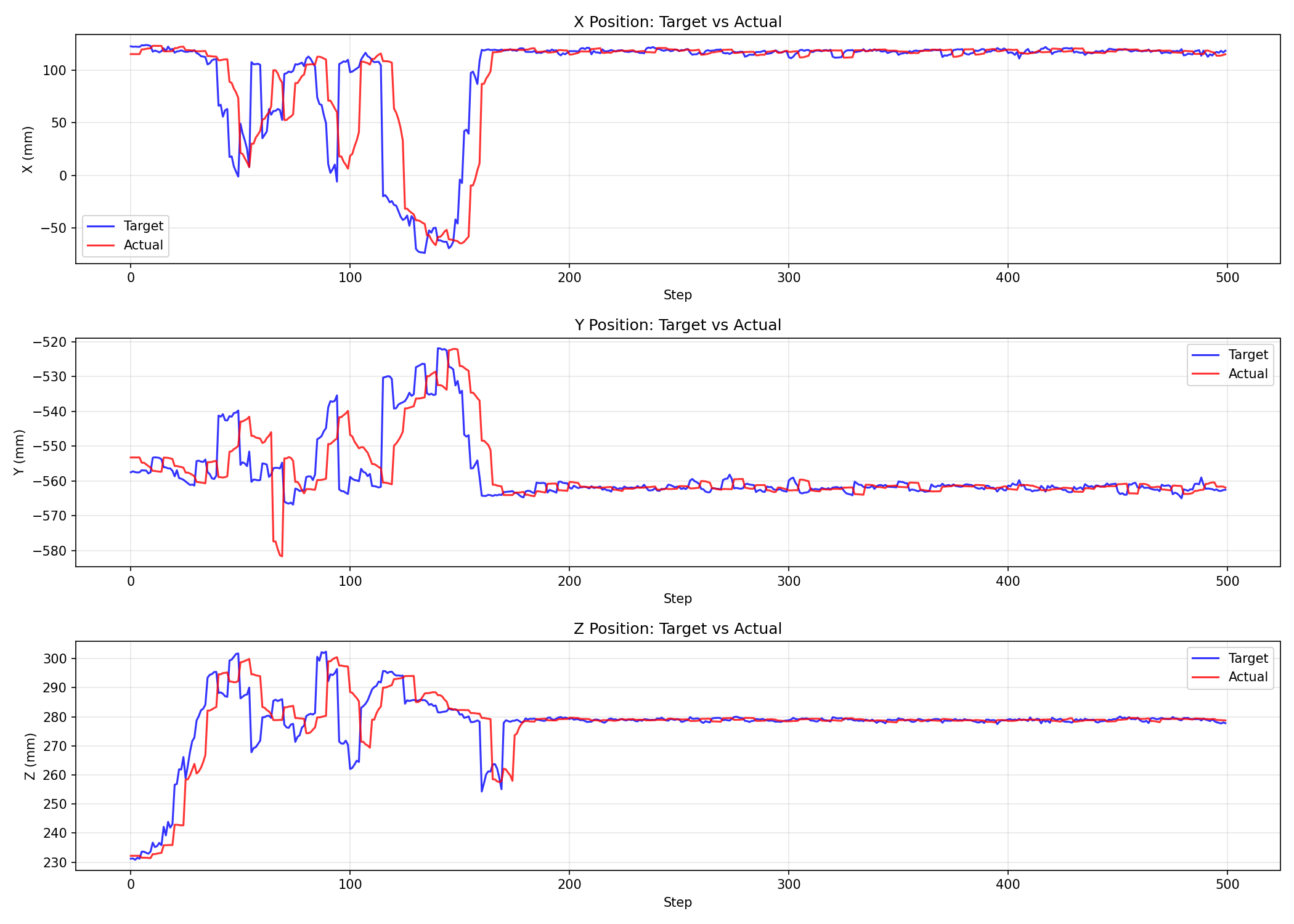
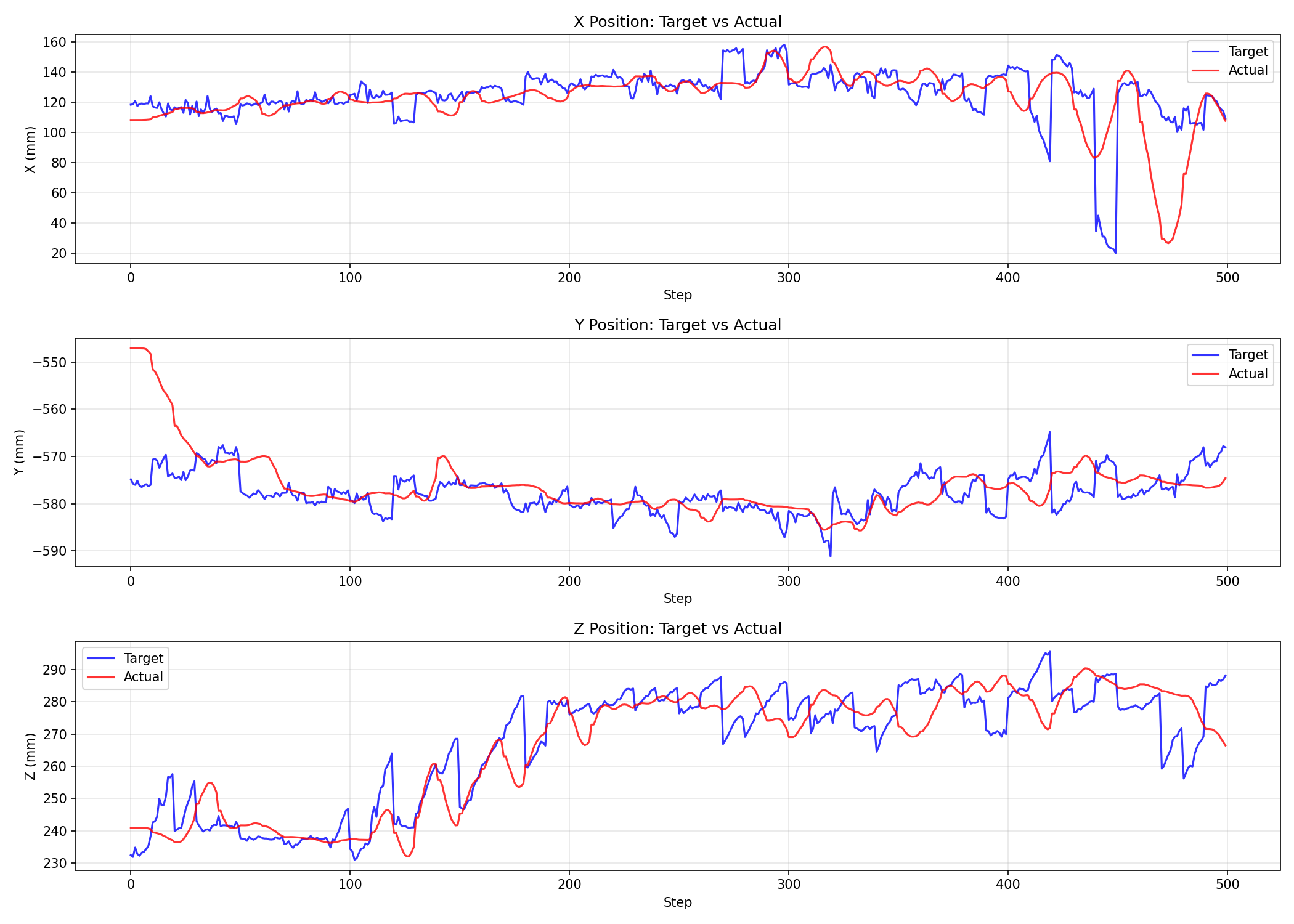
7.4 已观察到的播放误差
笔记中有两组代表性播放评估。
较短数据:
总帧数: 160
总时长: 2.84 秒
平均频率: 56.3 Hz
时间偏移补偿: 737 ms
机械臂位置误差:
平均值: 6.846 mm
中位数: 0.053 mm
最大值: 70.185 mm
95%分位: 39.739 mm
旋转误差:
平均值: 0.006 deg
最大值: 0.021 deg
夹爪位置误差:
平均值: 5.175
最大值: 80.000
总体评级: 较差
较长数据:
总帧数: 2037
总时长: 39.51 秒
平均频率: 51.6 Hz
机械臂位置误差:
平均值: 10.161 mm
中位数: 9.097 mm
最大值: 100.087 mm
95%分位: 21.467 mm
旋转误差:
平均值: 0.012 deg
最大值: 0.308 deg
夹爪位置误差:
平均值: 13.531
最大值: 160.000
总体评级: 较差
这说明当前播放链路可以完成重放,但位置跟踪误差仍不可忽略。旋转跟踪很好,位置误差主要集中在大跳变、起始阶段或 ServoP/控制器响应延迟上。
播放评估链路如下:
sequenceDiagram
participant Player as dataset_player.py
participant Arm as CR5 ServoP
participant Eval as playback_evaluator.py
participant Analyzer as analyze_playback.py
Player->>Arm: 逐帧发送 target pose / gripper target
Player->>Eval: 发布 /robot/target_pose
Arm->>Eval: 发布 ToolVectorActual
Eval->>Eval: 记录 target 与 actual
Eval->>Analyzer: 输出 evaluation_X.hdf5
Analyzer->>Analyzer: time_offset 补偿
Analyzer->>Analyzer: 计算位置、旋转、夹爪误差
8. HDF5 到 LeRobot v2.0 格式转换
8.1 转换目标
OpenPI / LeRobot 训练不直接吃项目 HDF5,而是使用 LeRobot 数据集。convert_to_lerobot.py 参考 any4lerobot 格式,将 HDF5 转为 LeRobot v2.0:
dataset/
├── data/
│ └── chunk-000/
│ ├── episode_000000.parquet
│ └── ...
├── videos/
│ └── observation.images.top/
│ └── chunk-000/
│ ├── episode_000000.mp4
│ └── ...
└── meta/
├── info.json
├── stats.json
├── episodes.jsonl
└── tasks.jsonl
笔记中最终数据集发布地址:
https://huggingface.co/datasets/leng234/cr5pickblock
8.2 字段映射
HDF5:
observations/robot_current [N, 6]
observations/gripper_current [N, 1]
actions/robot_target [N, 6]
actions/gripper_target [N, 1]
observations/images/color [N, H, W, 3]
timestamp [N]
LeRobot:
observation.state = concat(robot_current, gripper_current) # [N, 7]
action = concat(robot_target, gripper_target) # [N, 7]
observation.images.top = MP4 video
timestamp = 原始时间戳
episode_index = episode 编号
frame_index = episode 内帧编号
index = 全局帧编号
task_index = 0
next.done = 只有最后一帧为 True
7 维状态/动作含义:
0: x, mm
1: y, mm
2: z, mm
3: rx, deg
4: ry, deg
5: rz, deg
6: gripper, 0-1000 编码器/目标值
8.3 info.json
info.json 关键字段:
{
"codebase_version": "v2.0",
"robot_type": "dobot_cr3",
"fps": 30,
"data_path": "data/chunk-{episode_chunk:03d}/episode_{episode_index:06d}.parquet",
"video_path": "videos/{video_key}/chunk-{episode_chunk:03d}/episode_{episode_index:06d}.mp4",
"features": {
"observation.state": {
"dtype": "float32",
"shape": [7],
"names": ["x", "y", "z", "rx", "ry", "rz", "gripper"]
},
"observation.images.top": {
"dtype": "video",
"shape": [3, 480, 640]
},
"action": {
"dtype": "float32",
"shape": [7],
"names": ["x", "y", "z", "rx", "ry", "rz", "gripper"]
}
}
}
这里仍有 dobot_cr3 命名遗留。若要对外发布更规范,应改为 dobot_cr5,同时同步修改 OpenPI 数据配置名或至少在 README 中解释。
8.4 stats.json
stats.json 保存:
observation.state:
min/max/mean/std
action:
min/max/mean/std
这些统计值用于:
- 模型训练归一化。
- 推理输出反归一化。
- 辅助安全检查,比如动作是否超出采集分布。
需要注意:stats.json 不能代替机械臂硬件限位。它只是数据分布统计;真正真机执行时仍应有工作空间限制、跳变限制、速度限制和急停机制。
8.5 LeRobot 版本问题
笔记中明确记录:
- 最新 LeRobot 对旧 v2.0 数据集兼容性不好。
lerobot-dataset-viz最新版本会出现 backward compatibility error。- 最终使用
lerobot==0.3.3的方式可视化 v2.0 数据。
这说明当前数据集格式与工具链版本绑定较强。长期维护建议之一是:固定转换工具的 LeRobot 版本,或升级到 LeRobot v3 同时同步修改 OpenPI 数据加载配置。
格式转换关系如下:
flowchart LR
HDF5["HDF5 episode"]
Parquet["episode_xxxxxx.parquet"]
Video["observation.images.top MP4"]
Meta["meta/*.json / *.jsonl"]
HF["Hugging Face Dataset"]
OpenPI["OpenPI DataConfig"]
HDF5 -->|"robot_current + gripper_current"| Parquet
HDF5 -->|"robot_target + gripper_target"| Parquet
HDF5 -->|"RGB frames"| Video
HDF5 -->|"fps, stats, task, episode index"| Meta
Parquet --> HF
Video --> HF
Meta --> HF
HF --> OpenPI
HDF5 转换为 LeRobot 数据集的检查截图:


9. OpenPI / openpicr5 适配
9.1 OpenPI 基本推理服务
OpenPI 原始支持通过 WebSocket 做远程推理:
服务端:
客户端通过 openpi-client 的:
from openpi_client import websocket_client_policy
client = websocket_client_policy.WebsocketClientPolicy(host, port)
result = client.infer(observation)
actions = result["actions"]
这种架构把机器人的 ROS2 环境和模型的 GPU 环境分开,避免依赖冲突。
9.2 Dobot 数据输入适配
openpicr5/src/openpi/policies/dobot_cr3_policy.py 定义了输入/输出变换。
输入变换 DobotCR3Inputs:
- 读取
observation/image。 - 读取
observation/state。 - 将单相机图像映射到模型的
base_0_rgb。 - 左右腕部相机用零数组占位,并用 mask 置为 False。
- 透传 prompt。
核心结构:
inputs = {
"state": data["observation/state"],
"image": {
"base_0_rgb": base_image,
"left_wrist_0_rgb": np.zeros_like(base_image),
"right_wrist_0_rgb": np.zeros_like(base_image),
},
"image_mask": {
"base_0_rgb": np.True_,
"left_wrist_0_rgb": np.False_,
"right_wrist_0_rgb": np.False_,
},
}
输出变换 DobotCR3Outputs:
return {"actions": np.asarray(data["actions"][:, :7])}
即模型动作被裁剪回 7D:
x, y, z, rx, ry, rz, gripper
9.3 数据配置 LeRobotDobotCR3DataConfig
openpicr5/src/openpi/training/config.py 中定义了 Dobot 数据配置:
class LeRobotDobotCR3DataConfig(DataConfigFactory):
action_sequence_keys = ("action",)
repack 映射:
{
"observation/image": "observation.images.top",
"observation/state": "observation.state",
"actions": "action",
"prompt": "prompt",
}
注意点:
- LeRobot 数据集动作字段是
action,OpenPI 内部通用键常用actions,因此这里显式重命名。 prompt_from_task=True,让模型从tasks.jsonl读取任务 prompt。- 如果
norm_stats缺失,代码默认设置为空字典以避免训练时报错。但训练严肃使用时应提供正确 norm stats。
9.4 训练配置 pi0_dobot_cr3
当前配置:
TrainConfig(
name="pi0_dobot_cr3",
model=pi0_config.Pi0Config(
pi05=True,
action_horizon=10,
discrete_state_input=False,
),
data=LeRobotDobotCR3DataConfig(
repo_id="/home/hit/openpi/my_data/my_data",
base_config=DataConfig(prompt_from_task=True, video_backend="pyav"),
),
batch_size=8,
lr_schedule=CosineDecaySchedule(
warmup_steps=10_000,
peak_lr=5e-5,
decay_steps=1_000_000,
decay_lr=5e-5,
),
optimizer=AdamW(clip_gradient_norm=1.0),
ema_decay=0.999,
weight_loader=CheckpointWeightLoader("gs://openpi-assets/checkpoints/pi05_base/params"),
pytorch_weight_path="/home/hit/openpi/checkpoints/pi05_base_pytorch",
num_train_steps=30_000,
)
以及模型权重拷贝:
9.5 Prompt 与任务描述
训练/推理中使用自然语言 prompt,例如:
Pick up the red block and place it on the plate
pick up the red block
当前转换脚本中 tasks.jsonl 默认任务为:
{
"task_index": 0,
"task": "robot_teleoperation",
"task_description": "Teleoperation of Dobot CR3 robotic arm with gripper"
}
这与推理时具体 prompt 不完全一致。若训练数据实际任务都是“pick red block”等,应把 tasks.jsonl 改成真实任务描述,否则训练时语言条件和推理 prompt 有偏差。
10. 模型推理服务端
10.1 当前主线服务端
scripts/serve_policy.py 创建 policy 并启动:
server = websocket_policy_server.WebsocketPolicyServer(
policy=policy,
host=host,
port=port,
metadata=metadata,
)
server.serve_forever()
服务端默认监听 0.0.0.0:8000,客户端通过 WebSocket 发送 observation dict,服务端返回 action chunk。
10.2 origin/read 的服务端预热
origin/read 修改了 src/openpi/serving/websocket_policy_server.py,在 serve_forever() 前加入:
self.warmup()
asyncio.run(self.run())
预热输入:
dummy_obs = {
"observation/image": np.zeros((224, 224, 3), dtype=np.uint8),
"observation/wrist_image": np.zeros((224, 224, 3), dtype=np.uint8),
"observation/state": np.zeros(7, dtype=np.float32),
"prompt": "warmup",
}
目的:
- 触发模型第一次编译/缓存。
- 完成 PyTorch/Triton autotune。
- 避免真机第一步推理阻塞过长。
同一分支还在返回结果中增加:
action["server_timing"] = {
"infer_ms": infer_time * 1000,
}
这对定位“客户端阻塞来自网络还是模型推理”很有价值。
当前 main 是否保留 warmup 需要以分支代码为准。已观察到 main 里 websocket_policy_server.py 没有这些调试增强,说明 warmup 属于 origin/read 尝试分支,不是稳定主线。
推理服务端与客户端的数据交换如下:
sequenceDiagram
participant Cam as Orbbec RGB
participant Arm as CR5 反馈
participant Client as CR5InferenceNode
participant Server as WebSocketPolicyServer
participant Policy as OpenPI Policy
participant Control as ServoP / Modbus
Cam->>Client: /camera/color/image_raw
Arm->>Client: ToolVectorActual
Client->>Client: resize_with_pad + state 拼接 + prompt
Client->>Server: observation dict
Server->>Policy: infer(observation)
Policy-->>Server: actions[action_horizon, 7]
Server-->>Client: action chunk
loop 执行前 replan_steps 个动作
Client->>Control: ServoP(x,y,z,rx,ry,rz)
Client->>Control: SetHoldRegs(gripper)
Client->>Client: 发布 target_pose / gripper_target 供评估
end
11. 模型推理客户端
11.1 当前 examples/dobot_cr5/main.py
当前主线的 CR5 推理客户端文件:
openpicr5/examples/dobot_cr5/main.py
功能:
- 连接 WebSocket 策略服务器。
- 订阅 RGB 图像
/camera/color/image_raw。 - 订阅机械臂当前位姿
/dobot_msgs_v3/msg/ToolVectorActual。 - 构建 OpenPI observation。
- 以 action chunk + replan 的方式获取动作。
- 使用 ServoP 控制机械臂。
- 使用 Modbus 控制夹爪。
- 发布
/robot/target_pose、/gripper/command_update、/gripper/state_feedback,保持与采集/评估链路兼容。
或 tyro 风格:
11.2 客户端参数
host: localhost
port: 8000
resize_size: 224
replan_steps: 5
prompt: "pick up the object"
max_steps: 3000
dry_run: False
其中:
resize_size=224与 OpenPI 模型输入一致。replan_steps=5表示每次模型返回 10 步动作,但只执行前 5 步后重新推理。dry_run=True可用于不控制机械臂,只验证流程。
11.3 Observation 构建
当前客户端构建:
img = cv2.cvtColor(cv_image, cv2.COLOR_BGR2RGB)
img = image_tools.resize_with_pad(img, 224, 224)
img = image_tools.convert_to_uint8(img)
gripper_normalized = current_pos / 1000.0
state = [x, y, z, rx, ry, rz, gripper_normalized]
obs = {
"observation/image": img,
"observation/wrist_image": img,
"observation/state": state,
"prompt": prompt,
}
注意:当前没有腕部相机,observation/wrist_image 复用主相机。训练侧 DobotCR3Inputs 对腕部图像使用 mask=False 的零图占位,而当前推理客户端传的是主相机复用图。这个差异需要关注:
- 如果服务端 data transform 会把
observation/wrist_image忽略,则影响不大。 - 如果模型实际读取了该字段,训练/推理分布会不一致。
更稳妥做法是:推理客户端也与训练 transform 一致,将腕部图像置零并显式 mask 掉,或者训练时也复用主相机。当前报告只能指出此处存在潜在不一致。
11.4 Action 执行
模型输出:
actions: [action_horizon, 7]
action = [x, y, z, rx, ry, rz, gripper]
当前代码假设模型输出已经反归一化:
target_pose = action[:6]
gripper_raw = action[6]
gripper_target = clip(gripper_raw, 0, 1000)
机械臂控制:
ServoP(x, y, z, rx, ry, rz)
夹爪控制:
SetHoldRegs(addr=259, value=gripper_target)
11.5 动作队列与重规划
客户端不会每一帧都调用模型。逻辑是:
- 队列为空时调用
policy_client.infer(obs)。 - 模型返回 10 个动作。
- 只把前
replan_steps个动作加入队列。 - 每次循环弹出一个动作执行。
- 队列空了再推理。
这避免了每帧推理造成的延迟,也避免长动作 chunk 执行过久导致闭环不及时。
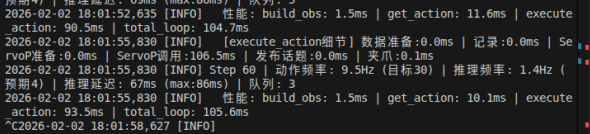
11.6 推理日志事实
笔记中记录的一段实际推理日志:
First inference elapsed=81.8ms
后续 inference 多在 58-68ms
ServoP 有时 3-6ms,有时 50-66ms
Step 30 动作频率 25.2Hz,去推理后 38.4Hz
Step 60 动作频率 25.9Hz,去推理后 39.1Hz
Step 150 动作频率 20.8Hz,去推理后 28.3Hz
结论:
- 模型推理本身约 60ms。
- ServoP 耗时不稳定。
- 即使目标是 30Hz,实际动作频率会受推理、ServoP 和队列阻塞影响。
- 强行 sleep 到 1/30 秒不一定提升效果,笔记中写明加 sleep 后频率反而降到约 26Hz。
推理客户端日志与 timing 记录:
12. 并行推理与独立进程尝试:为什么失败或未采用
12.1 问题背景
数据采集/播放中的 ServoP 调用可以达到较低延迟:
data_collector4.py 中 ServoP:
Avg: 11.86ms
Min: 2.36ms
Max: 58.40ms
但 VLA 推理客户端中,同样的 ServoP 有时达到:
90-100ms
这导致实际控制频率只能到约 10Hz 或 20Hz,低于目标 30Hz。
12.2 尝试 1:MultiThreadedExecutor + 回调组分离
思路:
- 将 ServoP 服务、图像订阅、状态订阅放入不同 callback group。
- 使用多线程 executor。
结果:
- 无明显改善。
- ServoP 仍约 100ms。
原因判断:
- callback group 只影响 Python 回调调度。
- ServoP 延迟主要不是 Python 回调互斥导致,而可能来自 DDS、Dobot 控制器响应、图像数据流干扰、服务调用频率等。
12.3 尝试 2:ServoNode 独立节点
思路:
- 单独创建一个只包含 ServoP client 的 ROS 节点。
- 避免图像订阅和状态订阅影响 ServoP client。
结果:
- 仍约 90-100ms。
原因判断:
- 虽然节点独立,但还在同一 Python 进程、同一 rclpy 上下文和同一网络/DDS环境中。
12.4 尝试 3:不同服务等待方式
尝试:
rclpy.spin_until_future_complete- 手动轮询:
while not future.done():
time.sleep(0.001)
结果:
- 两种方式延迟相似。
说明问题不主要在 future 等待 API。
12.5 尝试 4:ServoPThread 高频发送线程
思路:
- 独立线程持续高频发送 ServoP。
- 主推理循环只更新目标位姿,不等待 ServoP。
结果:
- 表面频率可提升。
- 但轨迹出现严重锯齿、波峰波谷和来回晃动。
关键原因:
- VLA 推理是闭环的。
- 上一次推理返回的 5 步动作还没执行完,下一次推理已经读到了“运动中的中间状态”。
- 模型基于中间状态预测下一段动作,可能需要往回修正,导致轨迹来回抖。
笔记中明确对比:
- dataset_player 非阻塞能跑,是因为它不重新推理,只顺序执行固定轨迹。
- VLA 推理非阻塞会抖,是因为动作执行和下一次 observation 之间存在闭环耦合。
12.6 尝试 5:独立进程 multiprocessing
思路:
- 将 ServoP 放到完全独立 Python 进程。
- 独立
rclpy.init()。 - 通过 multiprocessing queue 传目标位姿。
origin/read 中有:
def servo_process_worker(cmd_queue, result_queue, stop_event):
rclpy.init()
node = rclpy.create_node("servo_process_node")
...
结果:
独立进程 ServoP 延迟: 约 48ms
主进程等待时间: 约 85ms
控制频率仍约 10Hz
改善有限,原因:
- 进程内 ServoP 降低了部分延迟。
- 但主进程到 servo 进程的队列同步开销、等待结果开销、以及控制器响应延迟仍在。
- 图像订阅的大数据流和 DDS 层资源竞争可能仍影响整体系统。
12.7 尝试 6:独立进程 + 高频持续发送
思路:
- 即使没有新命令,也持续发送当前 pose。
- 让 Dobot 控制器保持“连续伺服模式”。
观察:
- 延迟约 48ms,仍未达到 data_collector 的 11ms。
- 轨迹质量不如阻塞方式稳定。
12.8 最终工程结论
SERVO_LATENCY_INVESTIGATION.md 的结论可以概括为:
- 无法在 VLA 推理客户端稳定复现
data_collector4.py的 11ms ServoP 延迟。 - Dobot 控制器可能和指令发送频率有关,高频持续 ServoP 更快。
- 图像订阅和推理会改变系统资源状态。
- 非阻塞虽然频率高,但轨迹质量差。
- 独立进程能部分降低 ServoP 调用时延,但总闭环收益不足。
- 当前最可用方案是阻塞执行或较串行的动作块执行,接受较低控制频率,优先保证轨迹质量和任务完成。
这就是“并行推理尝试失败”的真实原因:失败不是代码完全跑不起来,而是并行化破坏了 VLA 闭环控制中的状态-动作一致性,且系统瓶颈不只在 Python 线程。
并行尝试的失败模式可以画成:
flowchart TD
Obs0["观测 S0"]
Infer0["推理得到动作块 A0..A9"]
AsyncExec["非阻塞 / 高频 ServoP 执行中"]
MidState["机器人尚未到达目标,处于中间状态 S_mid"]
Obs1["下一次观测读到 S_mid"]
Infer1["模型基于 S_mid 重新推理"]
Correction["新动作试图修正上一段未完成动作"]
Oscillation["轨迹锯齿 / 来回抖动"]
Blocking["阻塞动作块执行"]
Stable["状态-动作因果更一致,频率较低但更稳"]
Obs0 --> Infer0 --> AsyncExec --> MidState --> Obs1 --> Infer1 --> Correction --> Oscillation
Infer0 --> Blocking --> Stable
13. 数据播放
13.1 dataset_player.py
dataset_player.py 用于重放 HDF5 轨迹,核心功能:
- 加载
actions/robot_target。 - 加载
actions/gripper_target。 - 按
timestamp的实际间隔播放。 - 使用 ServoP 控制机械臂。
- 用 Modbus 控制夹爪。
- 发布目标状态话题给评估器。
- 播放前做安全检查。
播放循环:
for each frame:
robot_pose = robot_target[i]
gripper_pos = gripper_target[i]
ServoP(robot_pose)
set_gripper(gripper_pos)
publish_robot_target(robot_pose)
sleep(next_timestamp - current_timestamp - elapsed_loop)
13.2 播放频率
播放不强行固定 100Hz,而是读取原始 timestamp:
time_diffs = np.diff(self.timestamps)
target_dt = time_diffs[i] / playback_rate
这比固定 sleep 更能保留录制时的节奏,也能用于慢放:
13.3 夹爪状态插补
dataset_player.py 中有 GripperStateFeedback 线程:
- 以约 10Hz 读取 Modbus 实际位置。
- 以更高频率发布插补后的夹爪实际状态和目标状态。
原因是夹爪 Modbus 回读慢,而评估和录制希望有更平滑的高频状态。
14. 模型微调流程
14.1 数据准备
完整数据准备流程:
- 启动 Dobot 驱动。
- 启动相机,建议启用 Fast DDS 共享内存,只开 RGB 640x480@30。
- 启动
recorder_optimized.py。 - 启动
data_collector4.py做遥操作。 - 通过遥操作按键发布
/recorder/command=1开始录制。 - 完成任务后发布
/recorder/command=2保存。 - 用
check_dataset.py检查质量。 - 用
dataset_player.py慢速播放验证安全性。 - 用
playback_evaluator.py+analyze_playback.py检查重放误差。 - 用
convert_to_lerobot.py转为 LeRobot v2.0。 - 用 LeRobot 可视化工具检查视频、状态、动作是否匹配。
微调准备流程如下:
flowchart LR
Deploy["启动 CR5 + 相机 + 录制器"]
Teleop["遥操作采集 episode"]
Quality["check_dataset 质量检查"]
Playback["dataset_player 慢速播放"]
Eval["playback_evaluator + analyze_playback"]
Convert["convert_to_lerobot.py"]
Visualize["LeRobot 可视化"]
Train["OpenPI pi0_dobot_cr3 微调"]
Serve["serve_policy.py 加载 checkpoint"]
Client["CR5 推理客户端"]
Deploy --> Teleop --> Quality --> Playback --> Eval --> Convert --> Visualize --> Train --> Serve --> Client
14.2 训练数据字段一致性
训练中最重要的是确保以下一致:
| 项目 | 采集 | 转换后 | OpenPI 输入 |
|---|---|---|---|
| 图像 | observations/images/color BGR/RGB 存储 |
observation.images.top MP4 |
observation/image -> base_0_rgb |
| 状态 | robot_current + gripper_current | observation.state 7D |
state 7D |
| 动作 | robot_target + gripper_target | action 7D |
actions 7D |
| 文字 | 任务描述 | tasks.jsonl |
prompt |
14.4 当前微调风险
当前微调存在几个必须注意的问题:
- 命名不一致:CR5 数据使用
cr3名称,容易误导后续维护者。 - prompt 过泛化:转换脚本默认任务是
robot_teleoperation,而推理 prompt 是具体任务。训练数据 prompt 应更接近真实任务。 - 腕部图像不一致:训练 transform 使用零腕部图像 + mask false;推理客户端复用主图像到 wrist image。
- action/state gap:笔记中提到“控制信号 action 和实际可达 state 存在 gap”。若动作标签是 target 而状态是 actual,模型学到的是命令空间;推理时输出命令是否能到达取决于 ServoP 和控制器响应。
- 数据质量波动:部分 episode 丢帧率 2.57%-4.74% 尚可,早期 27.15% 不建议训练。
- 夹爪信号低频:夹爪真实反馈经插补,不能过度解释为真实高频测量。
16. 当前系统主要问题
16.1 数据质量
共享内存前的数据丢帧率太高,不建议用于训练。共享内存后数据明显改善,但仍需逐 episode 检查:
- 丢帧率。
- 最大时间间隔。
- 起止位置。
- 是否存在突变。
- 是否有高速运动点。
16.2 手眼标定精度
当前静态 TF 可用,但笔记中仍承认重投影误差和标定板条件问题。若后续任务只依赖 RGB 图像和端到端策略,影响有限;若要用深度点云做动作先验或抓取点计算,则必须重新标定。
16.3 推理闭环频率
当前难点不是“能不能调用模型”,而是:
- 模型推理约 60ms。
- ServoP 时延不稳定。
- 非阻塞会造成轨迹抖动。
- 并行进程改善有限。
因此短期策略是接受较低控制频率,保证闭环 observation/action 的一致性。
16.4 动作标签语义
数据集中 action 是目标位姿,不是实际到达位姿。模型学到的是“应发送给控制器的命令”,不是“下一时刻实际状态”。这在 ServoP 延迟和控制器跟踪误差存在时,会影响推理效果。
可选方向:
- 保持现状,让模型学习命令空间。
- 把 action 改为延迟补偿后的实际可达状态。
- 训练时加入 action/state gap 的补偿。
- 用播放评估中估计的时间偏移修正标签。
当前代码没有系统性完成该补偿。
16.5 腕部图像字段
训练和推理对腕部图像处理不完全一致,建议统一。
16.6 命名混乱
CR5 真机适配中存在 cr3 命名遗留。短期不影响运行,长期会影响协作、报告和复现实验。
17. 建议的下一步
17.1 短期
- 固定当前稳定链路:
- Fast DDS 共享内存。
- RGB 640x480@30。
recorder_optimized.py。check_dataset.py。convert_to_lerobot.py。- 阻塞/串行推理客户端。
- 清理命名:
pi0_dobot_cr3可暂时保留,但在 README 明确“该配置用于 CR5,cr3 是历史命名”。- 新增
pi0_dobot_cr5alias 或正式配置。
- 统一腕部图像:
- 若没有腕部相机,推理也用零图 + mask false。
- 或训练时明确复用 top image。
- 每个 episode 入库前必须跑:
17.2 中期
- 重新做手眼标定:
- 标定板固定、尺寸准确。
- 关闭 IR projector 或控制红外照明。
- 输出重投影误差。
- 保存每次标定的 session 和最终 TF。
- 数据标签补偿:
- 根据播放评估得到的时间偏移,把 action 与未来 actual state 对齐。
- 比较“命令空间 action”和“可达状态 action”的训练效果。
- 服务端 warmup 合入主线:
- 将
origin/read的 warmup 和server_timing以可选参数方式合入,而不是只留在实验分支。
- 将
- 推理客户端日志标准化:
- 保存 infer_ms、servo_ms、gripper_ms、image_age_ms、state_age_ms。
- 每次运行生成 hdf5/csv 日志,便于对比。
17.3 长期
- 考虑 C++ ServoP 控制节点:
- Python/rclpy 对高频控制不是最理想。
- 可把控制执行层移到 C++,Python 只负责模型推理和目标下发。
- 明确实时控制接口:
- 研究 Dobot 控制器是否存在更适合连续伺服的接口或参数。
- 若 ServoP 服务调用本身不稳定,模型侧优化意义有限。
- 引入更可靠的数据格式版本:
- 迁移 LeRobot v3。
- 或固定 v2.0 工具链,写清依赖版本。
- 增加多任务数据:
- 当前看起来主要是 pick block。
- VLA 微调需要更丰富动作、物体、场景和语言。
18. 文件索引
真机笔记
真机笔记/二、真机部署 ...md
真机笔记/二、真机部署/手眼标定 ...md
真机笔记/二、真机部署/数据录制与播放 ...md
真机笔记/二、真机部署/数据录制与播放/代码修改 ...md
真机笔记/二、真机部署/hdf5到lerobot v2 0格式转换 ...md
真机笔记/二、真机部署/openpi环境部署 ...md
真机笔记/二、真机部署/推理客户端部署 ...md
真机笔记/二、真机部署/bug维修记录 ...md
openpicr5
examples/dobot_cr5/main.py
examples/dobot_cr5/README.md
examples/dobot_cr5/DESIGN.md
src/openpi/policies/dobot_cr3_policy.py
src/openpi/training/config.py
scripts/serve_policy.py
src/openpi/serving/websocket_policy_server.py
packages/openpi-client/src/openpi_client/websocket_client_policy.py
实验分支 origin/read 额外包括:
examples/dobot_cr5/SERVO_LATENCY_INVESTIGATION.md
examples/dobot_cr5/analyze_inference_log.py
examples/dobot_cr5/run_and_analyze.py
DOBOT_6Axis_ROS2_V3 origin/server
dobot_demo/dobot_demo/data_collector4.py
dobot_demo/dobot_demo/recorder_optimized.py
dobot_demo/dobot_demo/dataset_player.py
dobot_demo/dobot_demo/playback_evaluator.py
dobot_demo/dobot_demo/analyze_playback.py
dobot_demo/dobot_demo/check_dataset.py
dobot_demo/dobot_demo/fix_camera_info.py
dobot_demo/dobot_demo/convert/convert_to_lerobot.py
dobot_demo/dobot_demo/PLAYER_SAFETY_GUIDE.md
dobot_demo/dobot_demo/PLAYBACK_EVALUATION_GUIDE.md
ros2_ws_xing
recorder_optimized.py
fastdds_shm_config.xml
start_recording_optimized.sh
start_camera_shm.sh
start_recorder_shm.sh
camera_recorder_optimized.launch.py
verify_config.sh
test_performance.sh
OPTIMIZATION_README.md
20. 最终评价
这个项目已经从“能控制机械臂”推进到了“能采集 VLA 数据、能转换成 LeRobot、能训练 OpenPI、能在真机上通过 WebSocket 推理控制 CR5”的阶段。真正难点集中在三个方面:
- 数据时序:图像、机械臂、夹爪频率不同,严格同步会丢帧,插值是当前最实际方案。
- 控制延迟:ServoP 在推理客户端中时延不稳定,非阻塞和并行化并没有带来可用的闭环质量。
- 数据语义:action 是目标命令,state 是实际反馈,二者之间的 gap 会被模型学习或放大。
当前最推荐的稳定路线是:
共享内存相机 + 异步录制 + 图像时间主导插值
→ HDF5
→ 数据质量检查和慢速安全播放
→ LeRobot v2.0 转换
→ OpenPI pi0_dobot_cr3/pi0_dobot_cr5 微调
→ WebSocket 服务端
→ CR5 串行/阻塞动作块推理客户端
并行推理和独立 ServoP 进程的尝试应作为工程经验保留在报告和分支中:它证明了单纯追求高频不是 VLA 真机推理的核心,闭环状态一致性和轨迹质量更重要。